Object classification intelligent vehicle based on image recognition and control method thereof
An image recognition and control method technology, applied in the direction of program control manipulator, sorting, manufacturing tools, etc., can solve the problems of inconvenient portability and high manufacturing cost, and achieve the effect of reducing equipment cost, accurate classification, and flexible driving.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
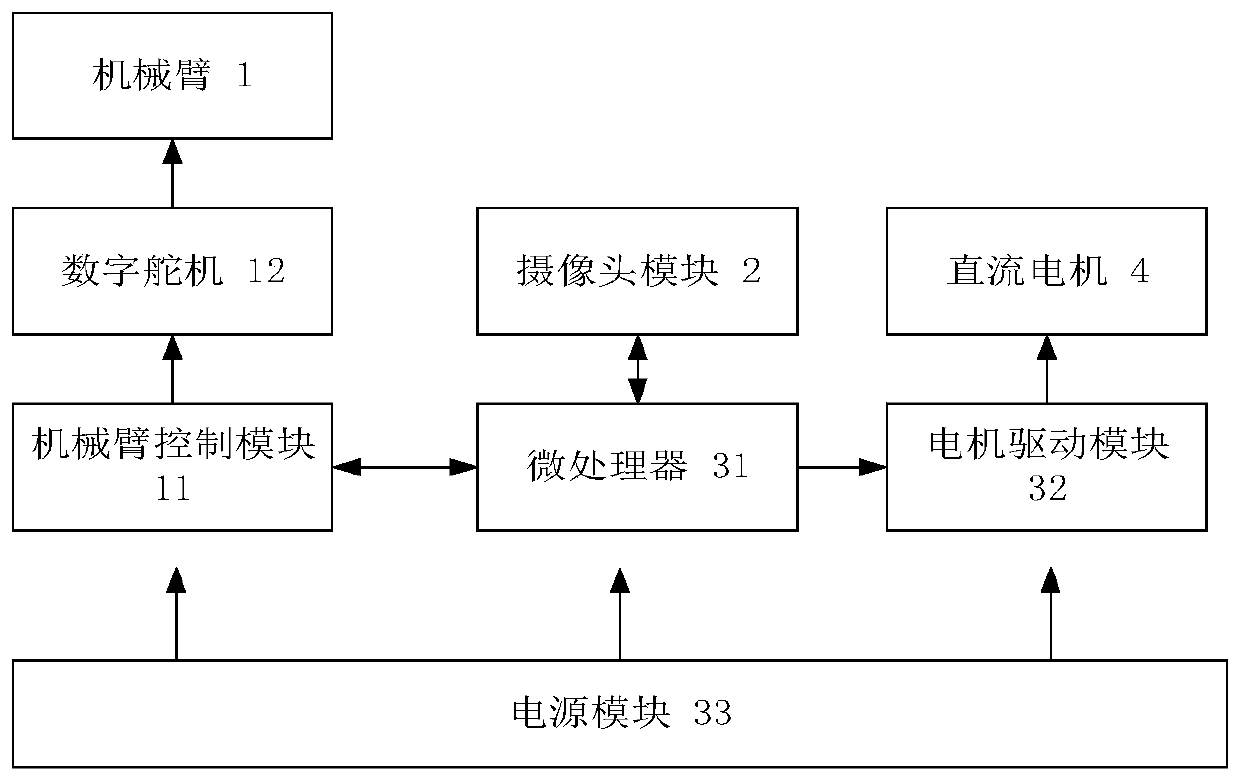
[0050] Such as figure 1 As shown, the smart car for object classification based on image recognition includes a car body, a mechanical arm 1 and a camera module 2 arranged on the car body, a crawler base arranged at the bottom of the car body, and a control circuit 3 arranged on the car body ;in:
[0051] The camera module 2 is electrically connected to the control circuit 3 to realize information interaction;
[0052] The output end of the control circuit 3 is electrically connected to the control end of the mechanical arm 1 and the base of the crawler vehicle.
[0053] More specifically, the robotic arm 1 is provided with a robotic arm control module 11 and a digital steering gear 12; wherein:
[0054] The input end of the manipulator control module 11 is electrically connected to the control circuit 3;
[0055] The output end of the manipulator control module 11 is electrically connected to the digital steering gear 12;
[0056] The digital steering gear 12 is used to d...
Embodiment 2
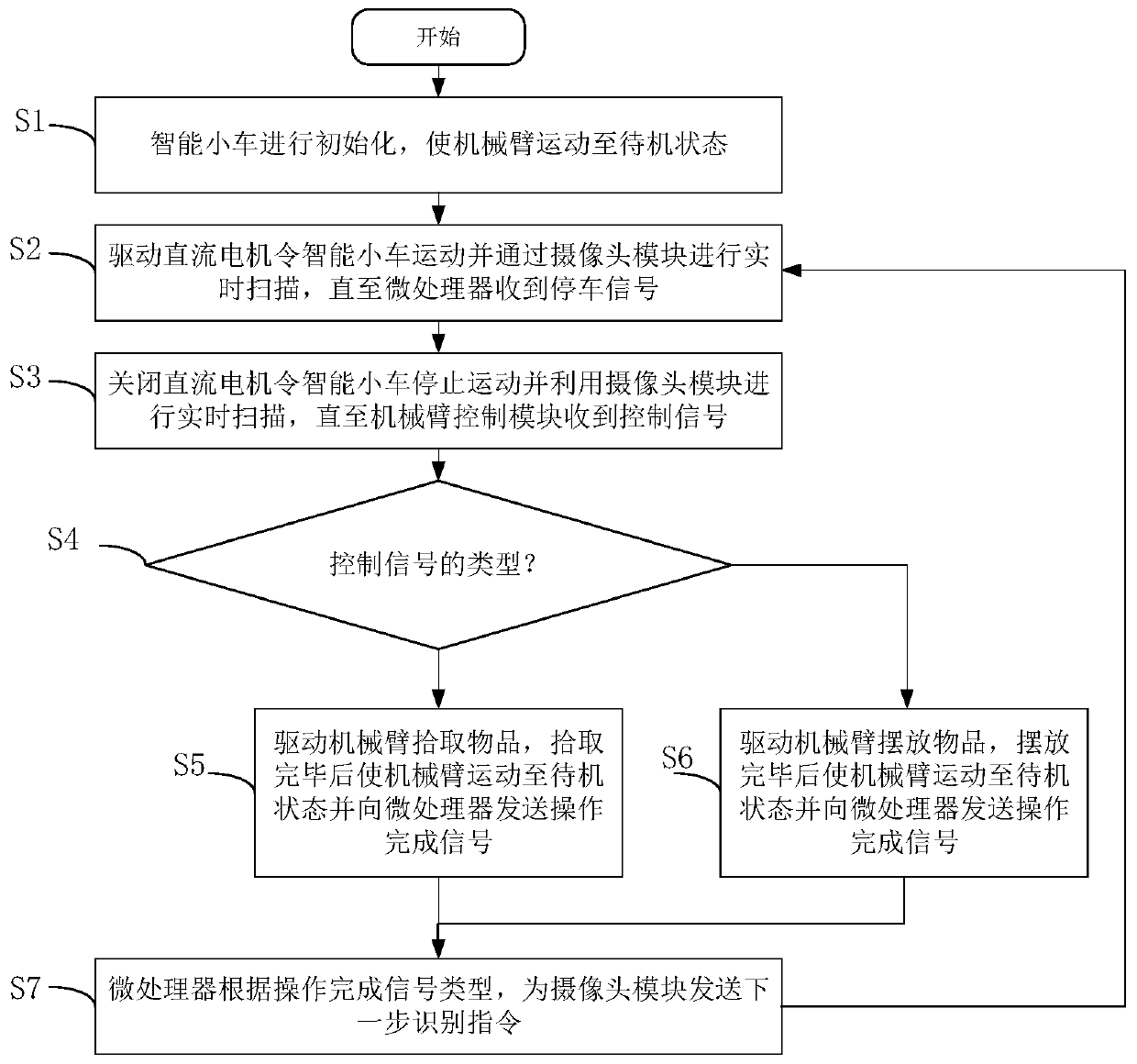
[0071] More specifically, on the basis of embodiment 1, the control method of the smart car based on the object classification of image recognition includes the following steps:
[0072] S1: The smart car is initialized to make the robot arm 1 move to the standby state;
[0073] S2: drive the DC motor 4 to make the smart car move and scan in real time through the camera module 2 until the microprocessor 31 receives a stop signal;
[0074] S3: Turn off the DC motor 4 to stop the smart car and use the camera module 2 to perform real-time scanning until the control signal of the mechanical arm control module 11 is received;
[0075] S4: Determine the type of the control signal, if it is "pick up", execute step S5; if it is "placement", execute step S6;
[0076] S5: Drive the mechanical arm 1 to pick up the item, and after the picking is completed, move the mechanical arm 1 to the standby state and send an operation completion signal to the microprocessor 31, and execute step S7;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com