Rope and spring drive type three-freedom-degree parallel binocular focusing bionic eye execution mechanism
An actuator and a degree of freedom technology, applied in the field of bionic eye mechanism, can solve the problems of large installation space, increased control difficulty, complex mechanism, etc., and achieve the effects of convenient device control and operation, easy popularization and application, and simple device structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
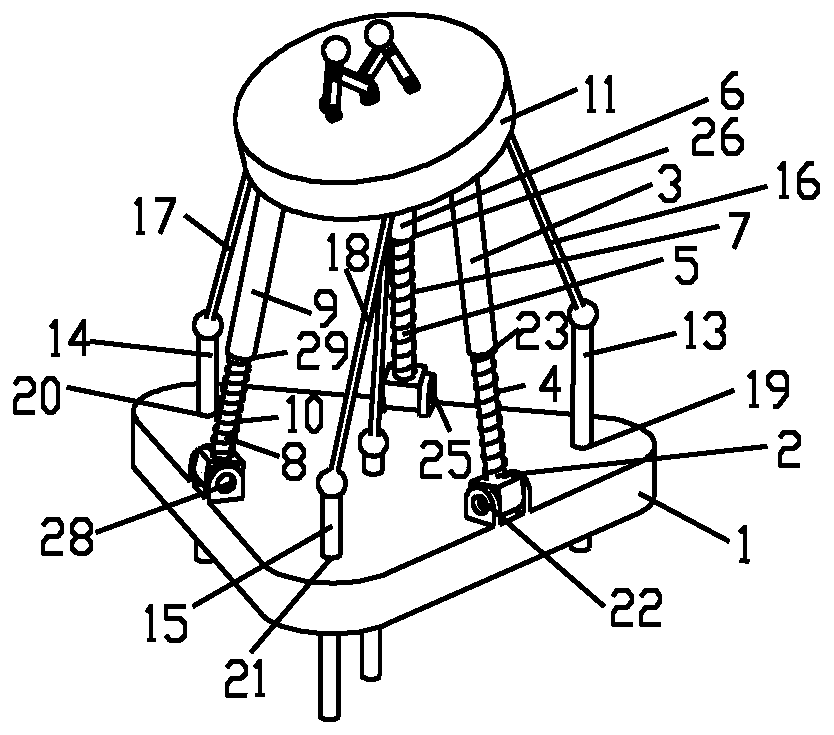
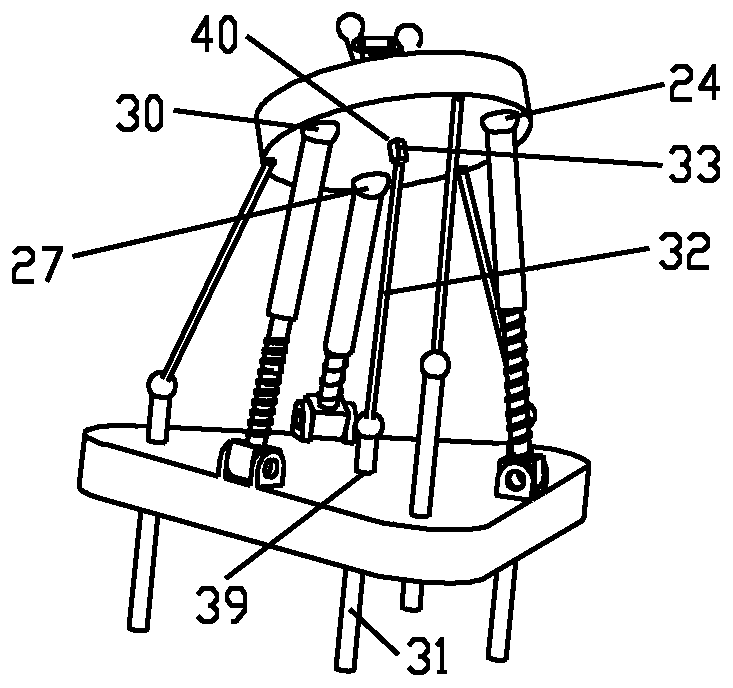
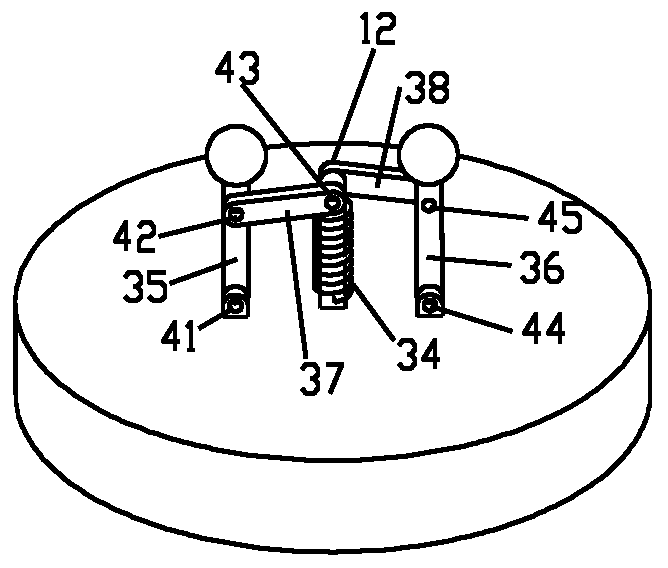
[0022] In this example, see Figure 1 ~ Figure 4 , a three-degree-of-freedom parallel binocular focusing bionic eye actuator driven by a rope spring, including a frame 1, a moving platform 11, a first camera and a second camera, and a first drive rod 13, a second drive rod 14, The third driving rod 15, the fourth driving rod 31, the first rope 16, the second rope 17, the third rope 18, the fourth rope 32, the three-degree-of-freedom parallel mechanism and the binocular focus adjustment mechanism;
[0023] The three-degree-of-freedom parallel mechanism includes the first link 2, the second link 3, the third link 5, the fourth link 6, the fifth link 8, the sixth link 9, the first spring 4, and the second spring 7. The third spring 10, the moving platform 11, the first connecting rod 2 is rotationally connected with the frame 1 through the first rotating pair 22, the first connecting rod 2 is connected with the second connecting rod 3 through the first moving pair 23, the first ...
Embodiment 2
[0030] This embodiment is basically the same as Embodiment 1, especially in that:
[0031] In this embodiment, the moving platform 11 is made of a triangular, star-shaped, square or hexagonal plate, and the first rope 16, the second rope 17, and the third rope 18 are respectively connected to the outer edge or free end of the moving platform 11. Make a flexible connection. This embodiment makes the structure of the device more diversified, and meets the device structure requirements of different equipment compactness.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com