Robot path robustness planning method based on monocular camera ranging uncertainties
An uncertain, robotic technology, applied in instruments, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problems of reducing the size of the attraction domain, slow calculation of the attraction domain, etc., to reduce the impact , good obstacle avoidance function, strong feasibility effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
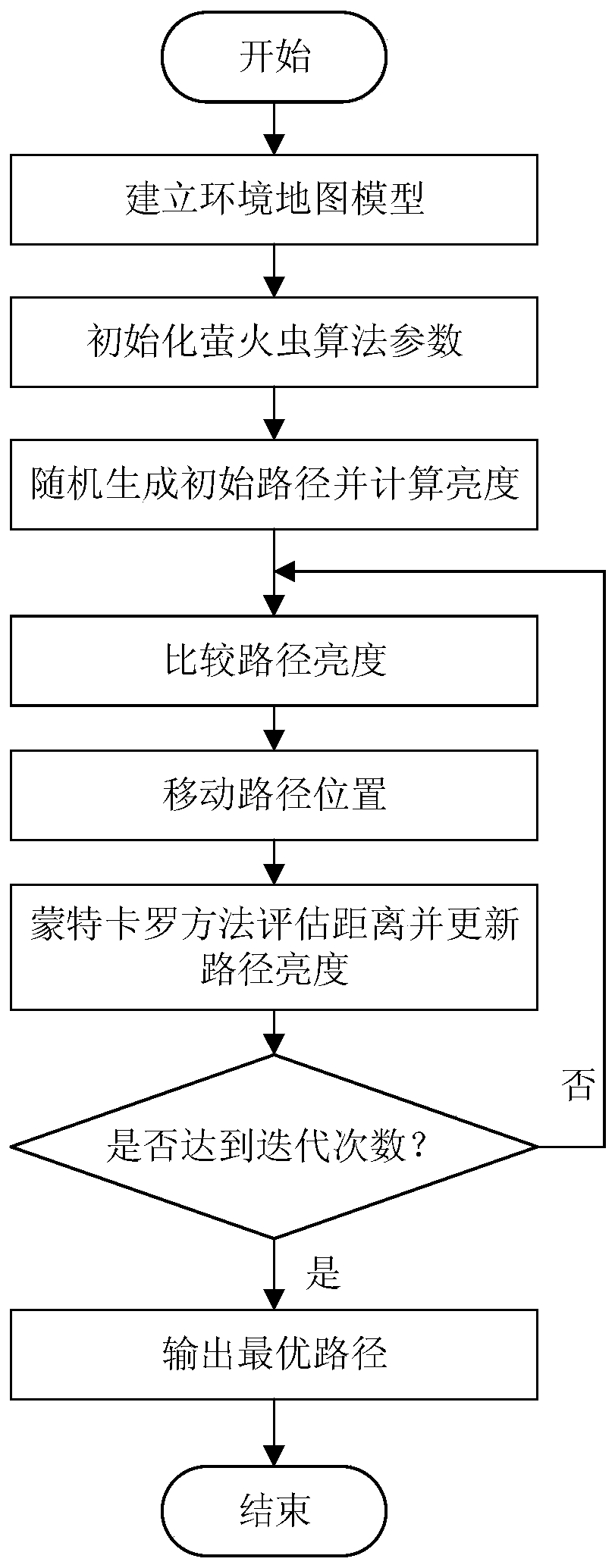
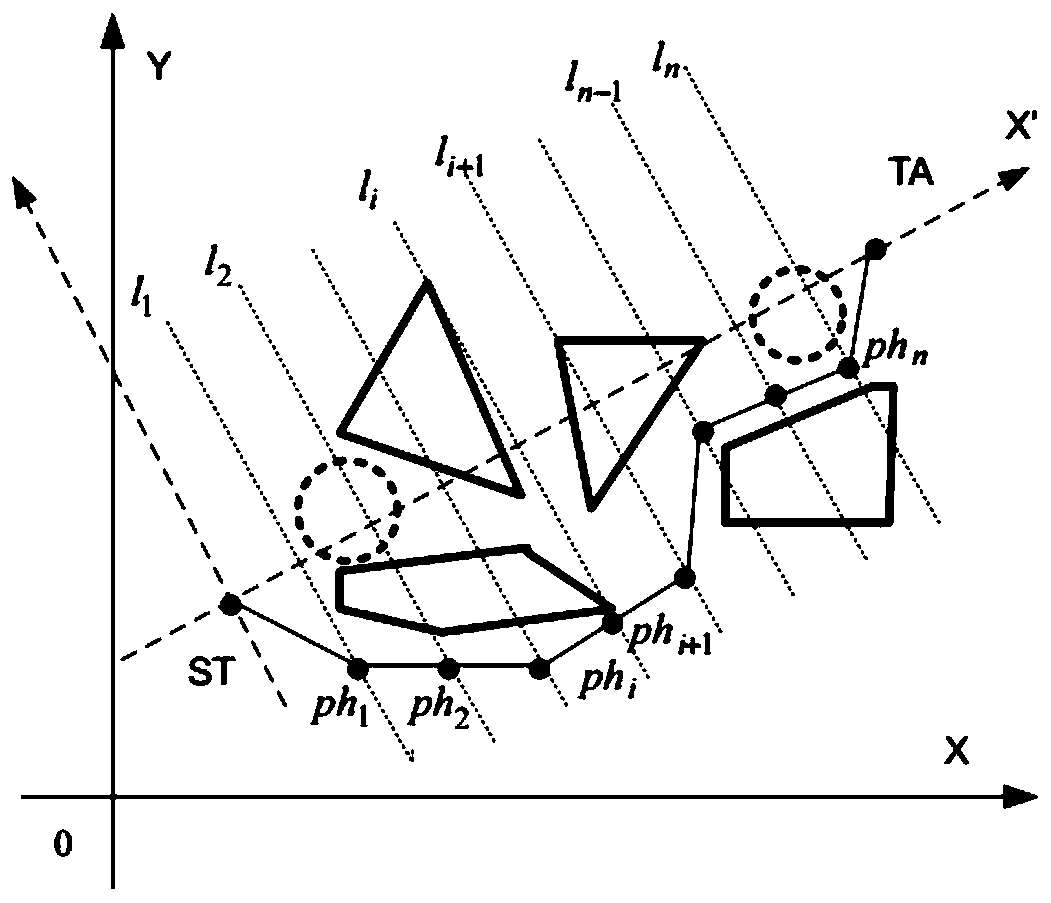
[0034] Such as figure 2 , image 3 As shown in , the environment model of path planning is a square in a two-dimensional plane, and the obstacles are static obstacles, which can be described according to the actual scene; the overall flow chart of path planning is shown in figure 1 shown.
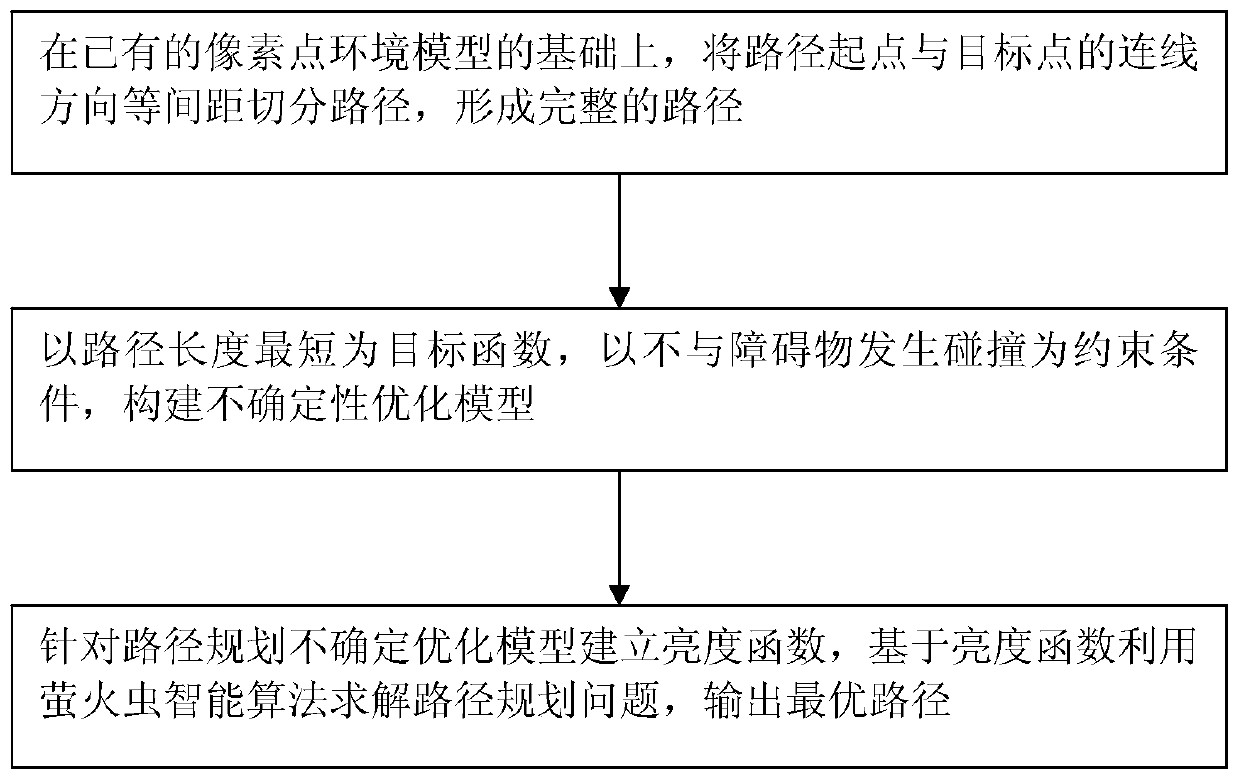
[0035] A robot path robustness planning method based on monocular camera ranging uncertainty, comprising the following steps:
[0036] The first step is to establish a map model: the path planning calculation domain is a rectangle of 300*500 pixels, and the distance between two adjacent pixels represents a physical distance of 1CM. Therefore, the area of the environment map is 300CM*500CM. In the existing pixels On the basis of the environment model, connect the starting point of the path and the target point, divide 11 vertical lines perpendicular to the conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com