Three-dimensional gait generating method based on human body motion structure characteristic
A technology of structural features and human movement, applied in medical equipment, medical simulation, medical informatics, etc., can solve problems such as difficulty in ensuring generality, affecting the effect of rehabilitation training, and not caring about three-dimensional gait
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] In the following, the embodiments of the present invention will be described in detail and clearly in combination with the embodiments and the accompanying drawings.
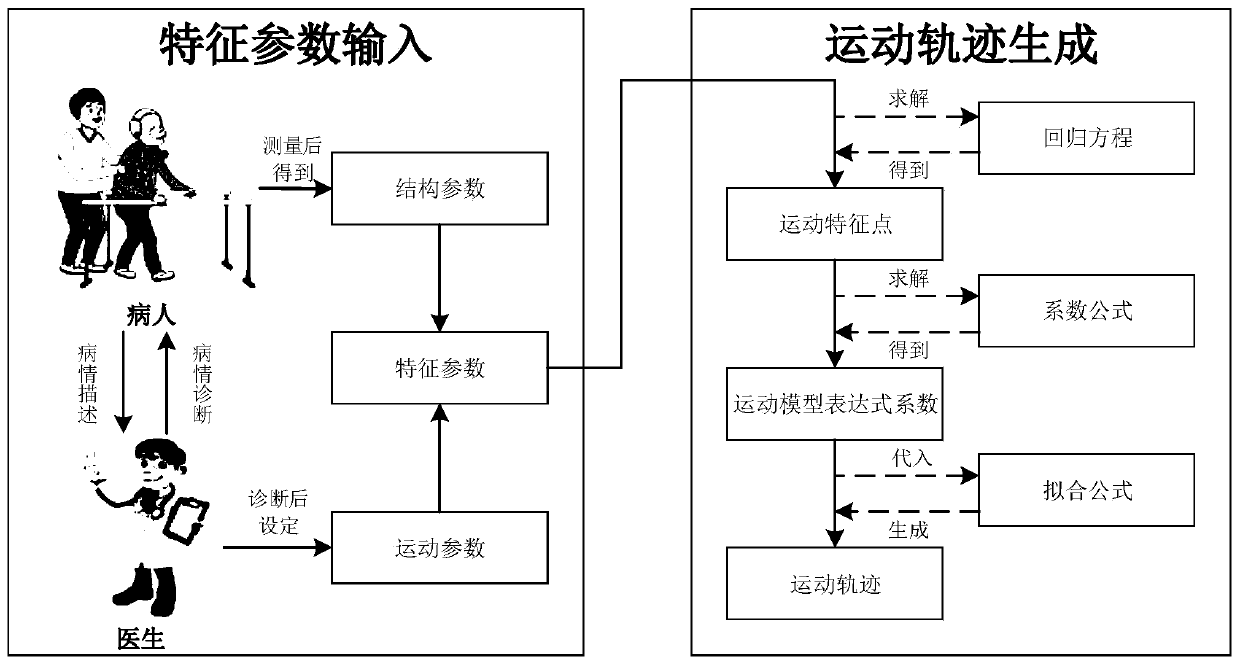
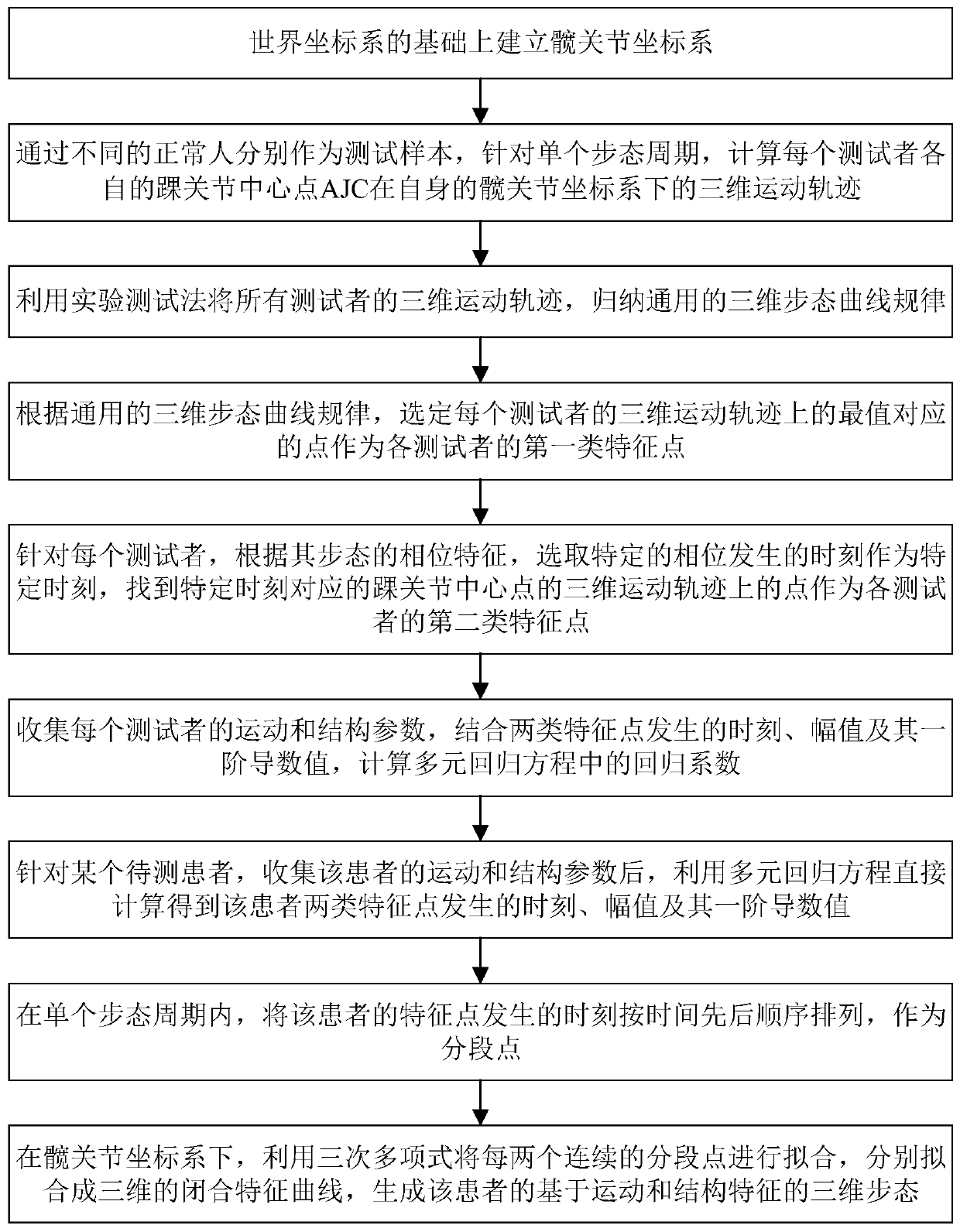
[0063] The invention proposes a parameterized three-dimensional gait generation method based on human body motion and structural features based on the law of coordinated movement of lower limb joints obtained from normal human walking experiments. Such as figure 1 As shown, for a test patient, the structural parameters of the patient are firstly measured, and then the doctor diagnoses and obtains the patient's motion parameters according to the patient's condition description. Structural parameters and motion parameters are used as characteristic parameters, which are substituted into the regression equation to obtain the occurrence time, amplitude and first derivative value of the patient's characteristic points. The time, amplitude and first derivative of the patient's characteristic points are used to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com