A Global Robust Sliding Mode Control Method for Surface Vessel Trajectory Tracking Based on Dragonfly Algorithm Optimization
A trajectory tracking and control method technology, applied in the field of ships, can solve the problems of high-frequency buffeting and complex sliding mode parameter tuning, and achieve the effects of reducing high-frequency buffeting, achieving global fast stability, and solving unrobustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Further describe the present invention below in conjunction with accompanying drawing:
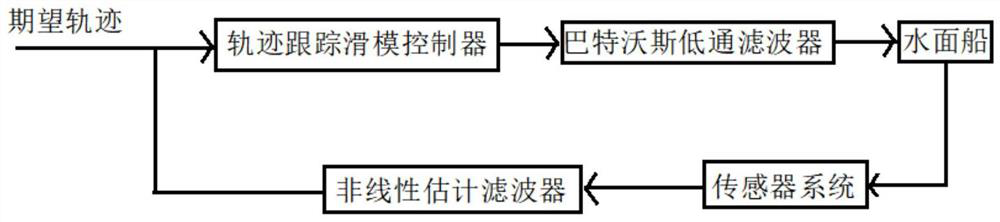
[0035] Such as figure 1 , a global robust sliding mode control method for surface ship trajectory tracking based on Dragonfly algorithm optimization, including the following steps:
[0036] Step (1): Establish the three-degree-of-freedom motion model of the ship:
[0037] In view of the sailing condition of the surface ship at sea, if the sea area is large, the surface ship will be subject to a relatively large static water restoring force. Under the influence of the strong static water restoring force, the movement perpendicular to the horizontal plane is compared with the movement on the horizontal plane. It is not very obvious, and the research focus is also on the track control and route selection of the surface ship, that is, the movement on the horizontal plane, rather than the sailing attitude of the surface ship. Therefore, the movement of the surface ship can be simplified...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com