Dynamic trajectory planning method for unmanned vehicle based on local optimum
An unmanned vehicle, trajectory planning technology, applied in vehicle position/route/height control, motor vehicle, non-electric variable control and other directions, can solve the problem of rarely considering passenger comfort and road driving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
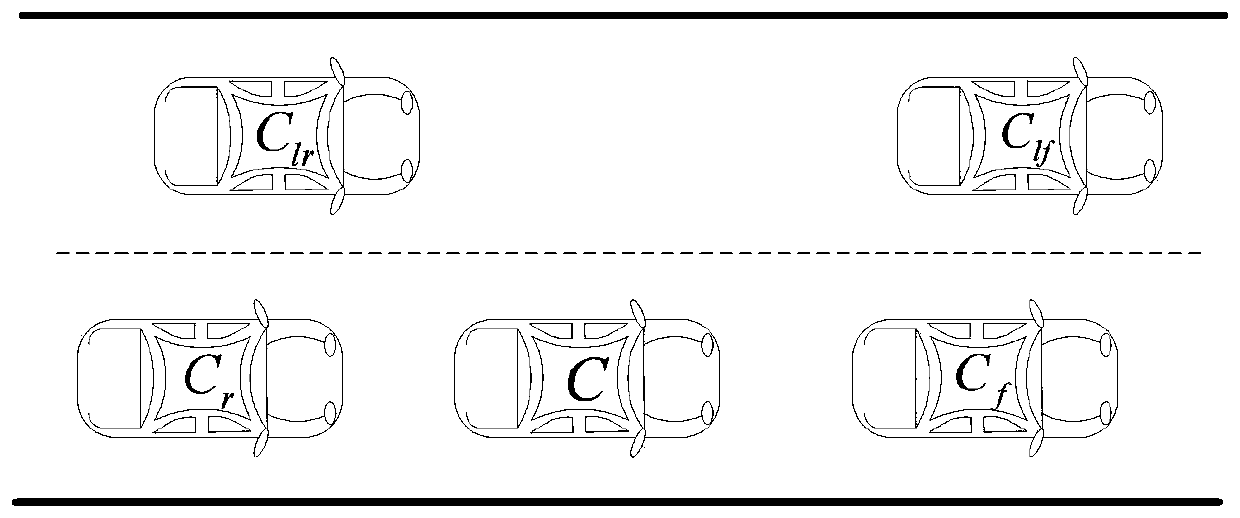
[0066] The present invention assumes that the unmanned vehicle is driving on a structured road. In the three-lane model, it is assumed that there are obstacle vehicles in the front and rear of the adjacent lane of the unmanned vehicle and the lane for the sake of rigor. Since no matter which lane the unmanned vehicle is in, the target lane selected when changing lanes according to traffic rules must be an adjacent lane, that is, when the unmanned vehicle is in the middle lane, it can only change lanes to the left or right, which is symmetrical, so can be simplified as figure 2 Two-lane model shown.
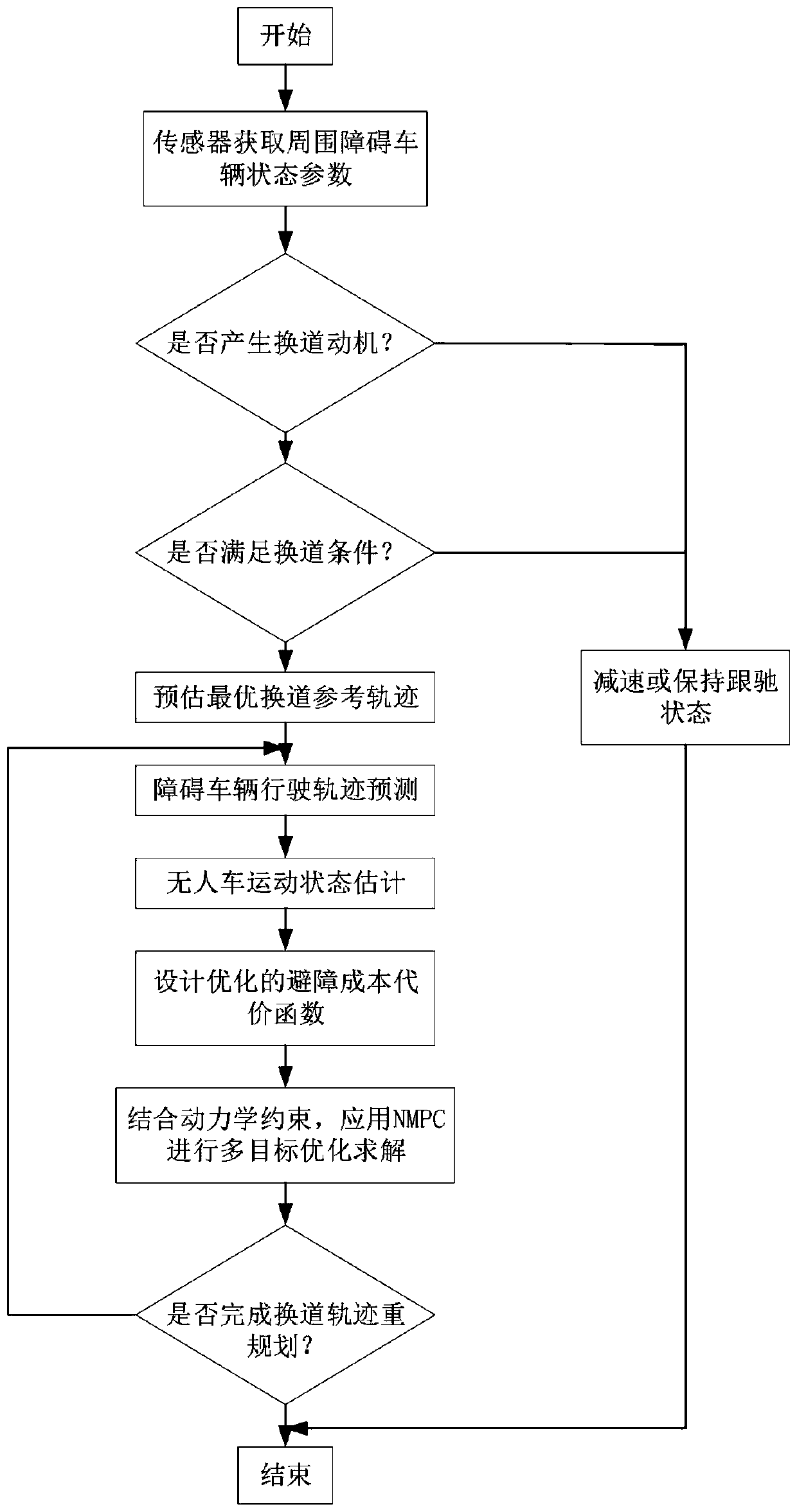
[0067] The present invention provides a dynamic trajectory planning method for unmanned vehicles based on local optimality, such as figure 1 As shown, the metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com