A three-degree-of-freedom passive force-interaction upper limb rehabilitation training instrument
A passive, degree-of-freedom technology, applied in the field of rehabilitation, which can solve the problems of complex structure, long response time and poor safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
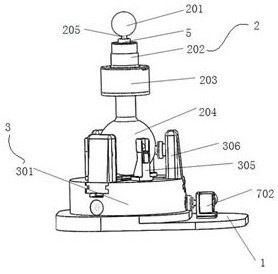
[0034] see Figure 1 to Figure 9, a three-degree-of-freedom passive force-interactive upper limb rehabilitation training instrument provided by the present invention is now described. The present invention provides a three-degree-of-freedom passive force-interactive upper limb rehabilitation training instrument, which includes a mounting base plate 1, and a board body of the mounting base plate 1 The training unit and the motion detection unit are arranged in sequence on the top, and the user achieves the purpose of training and rehabilitation by operating the training unit, and the motion detection unit detects the training intensity of the training unit in real time.
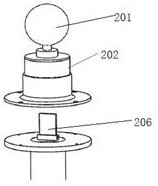
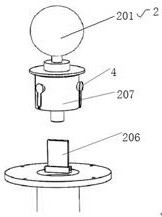
[0035] In this embodiment, the training unit includes a handle structure 2 and a resistance structure 3, and the handle structure 2 includes a handle 201, an upper base 202, a lower base 203, a ball rotor 204, a movable shaft 205, and a gyroscope 206 connected in sequence. and the movable shaft 207, the upper ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com