An air-driven soft finger with embedded vision
A finger, gas-driven technology, applied in the field of gas-driven software fingers, can solve the problem of inability to obtain multi-dimensional curvature information, and achieve the effect of optimizing imaging ratio, ensuring structural stability, and facilitating capture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific structure and working principle of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments. For ease of description, the side facing the back of the hand is referred to as the upper side, and the side facing the palm is referred to as the lower side.
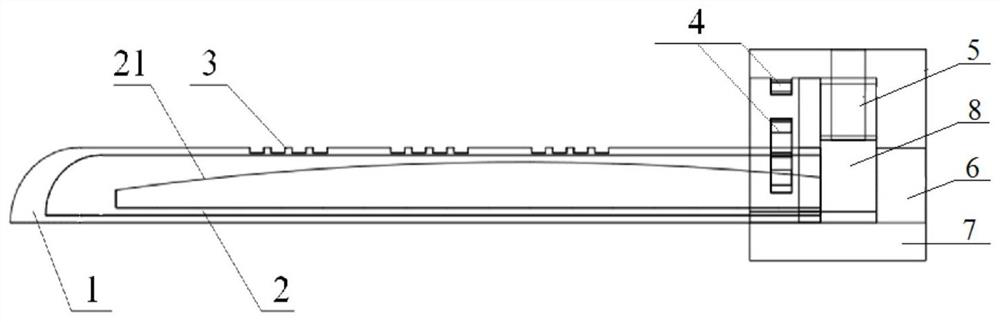
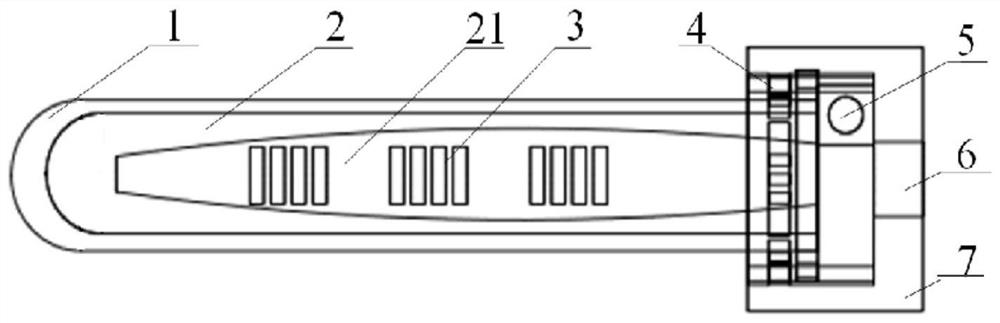
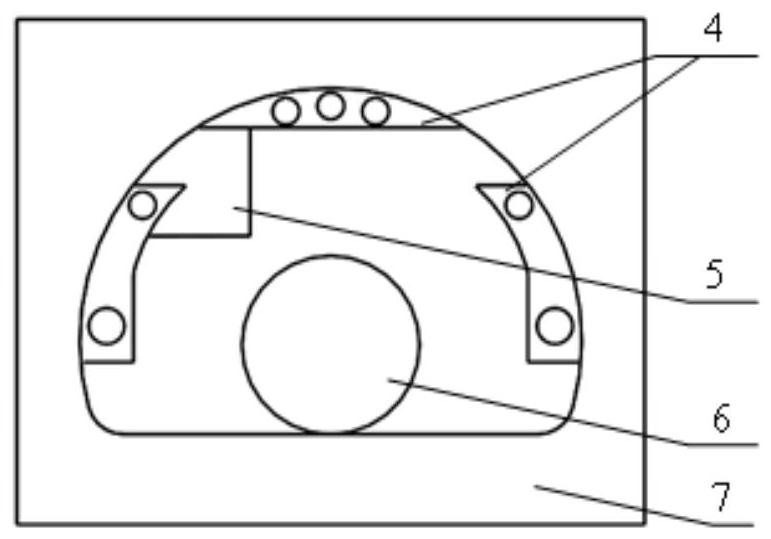
[0034] An embodiment of an air-driven soft finger with built-in vision proposed by the present invention is as follows: figure 1 , figure 2 with image 3 As shown, it includes a finger body embedded in the sealing device 7; the finger body is composed of a shell 1 and an elastic cavity 2 accommodated inside the shell 1, and the inner surface of the shell 1 is completely attached to the outer surface of the elastic cavity 2. Together, the surface of the upper side wall of the housing 1 is provided with multiple sets of groove arrays 3 at intervals; when the finger body is in a straightened state, the inner surface of the upper side wall of the el...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com