Robot target grabbing detection method based on continuous path
A detection method and robot technology, applied in the direction of instruments, manipulators, computer parts, etc., can solve problems such as the inability to effectively reflect the probability of grasping, and achieve the effect of speeding up training time and fast convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
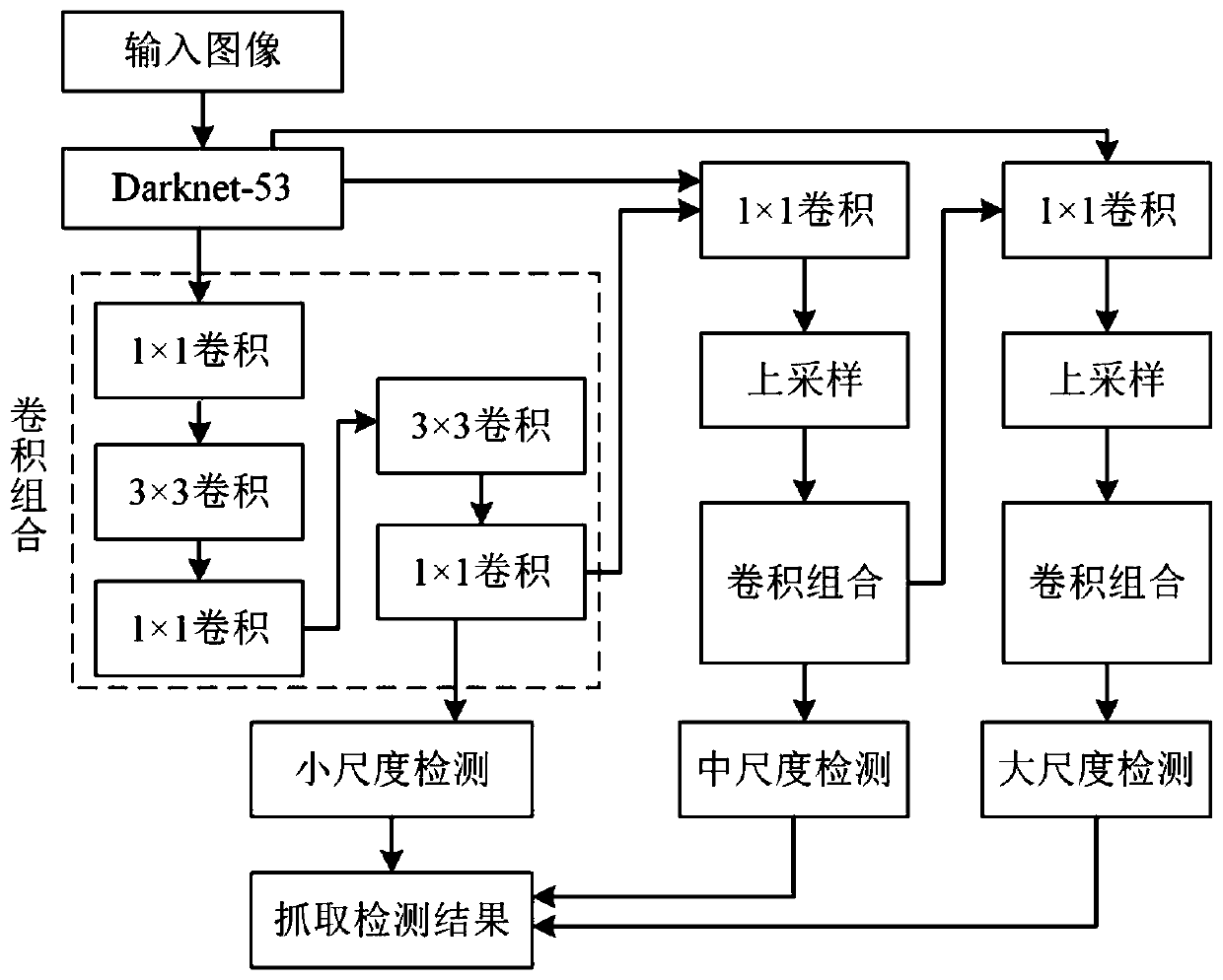
[0030] The invention proposes a continuous path-based robot target grasping detection method, which mainly consists of three parts: continuous path representation, grasping detection model construction and model training / testing.
[0031] The method specifically includes steps as follows:
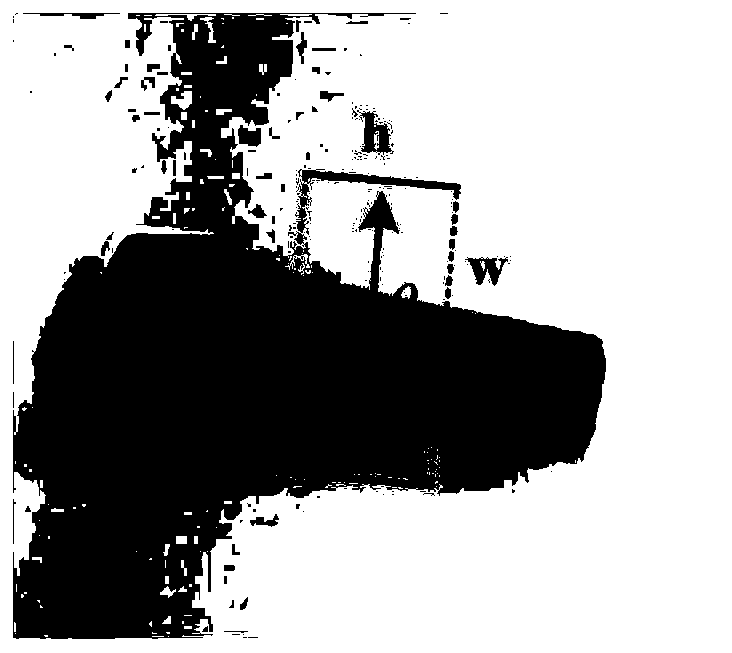
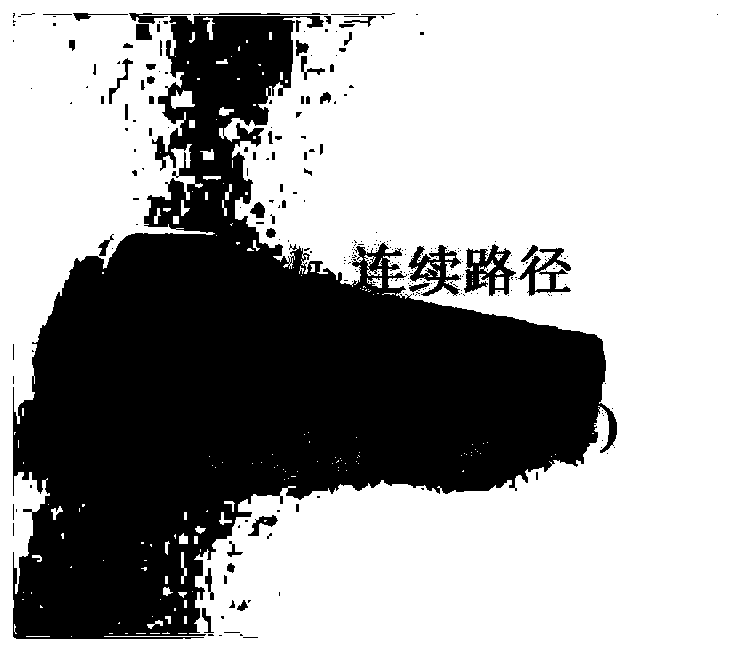
[0032] 1. Obtain a continuous path on the grasped object: connect the geometric center points of the overlapping grasping areas on the grasped object to obtain a path set;
[0033] Since a small number of given discrete real grasping areas cannot effectively describe all the graspable areas on the object, the concept of continuous path is introduced, which is defined as one or more straight line segments distributed on the object, any distribution on the straight line segment, Directed rectangular frames that meet certain conditions can be considered as graspable regions.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com