Mobile robot navigation method
A mobile robot and navigation method technology, applied in the field of reinforcement learning algorithm, can solve problems such as slow convergence speed iteration, achieve fast convergence, high learning efficiency, and reduce invalid exploration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
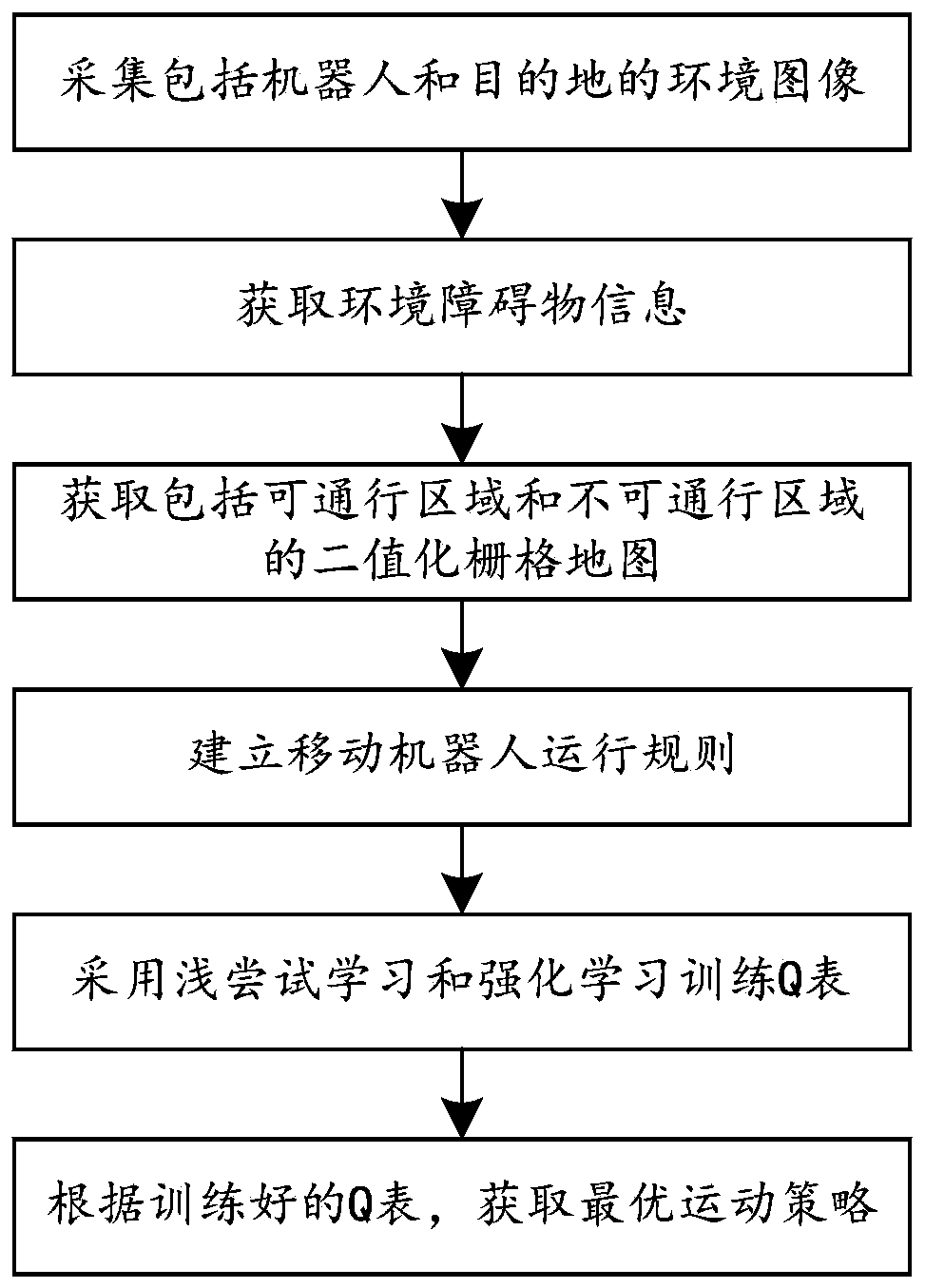
[0049] Such as figure 1 As shown, a mobile robot navigation method is provided with an image acquisition device over the navigation area, including the following steps:
[0050] Step 1. The image acquisition device acquires an image of the mobile robot environment before the robot moves, and the image includes the robot and the destination;
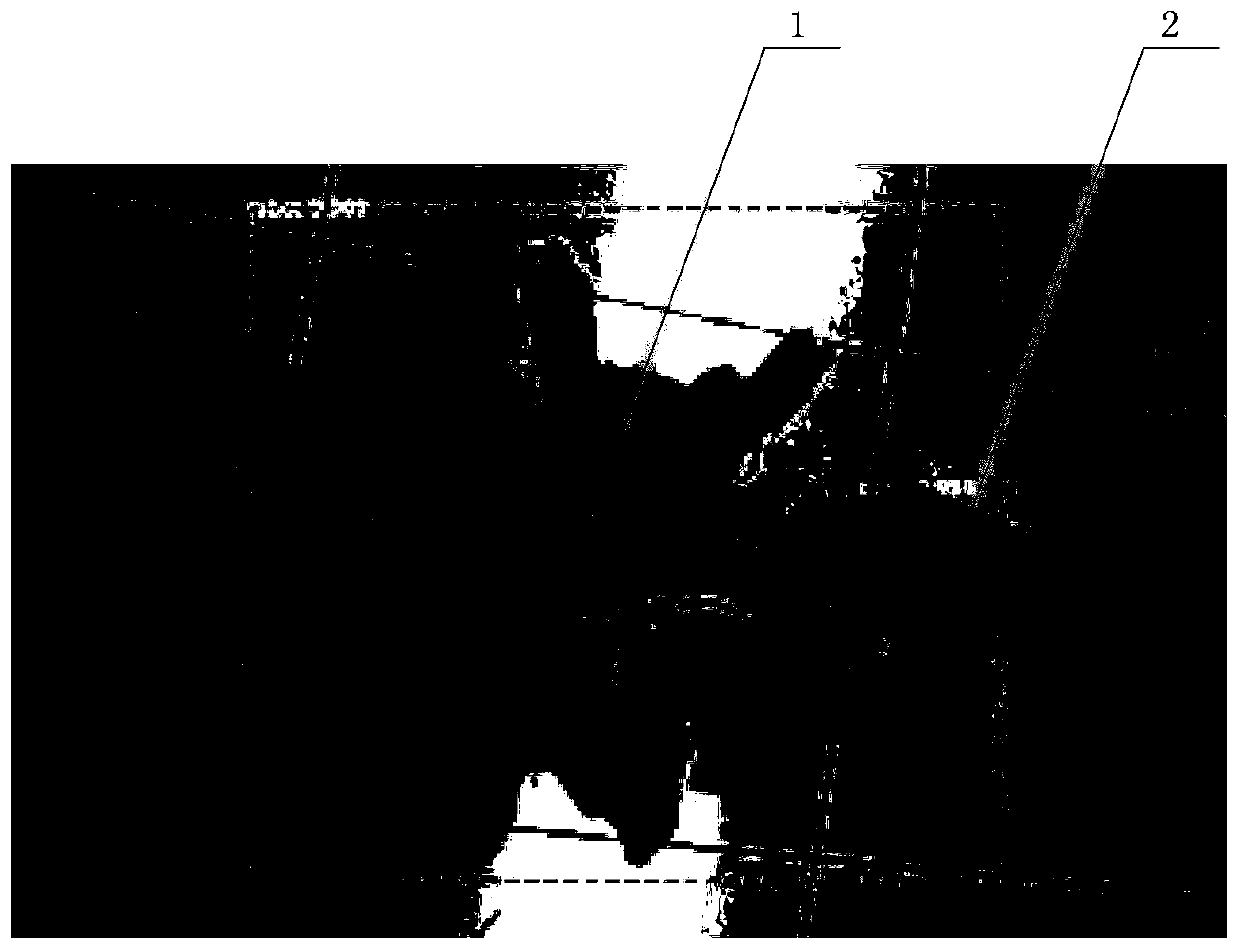
[0051] Step 2. Obtain environmental obstacle information according to the collected environmental image;
[0052] Using the Mask R-CNN algorithm, the pixels of the environment image are divided into three categories: obstacle pixels, robot pixels and other pixels, and the environment information is obtained. figure 2 It is the segmentation result map of robot 1 and obstacle 2.
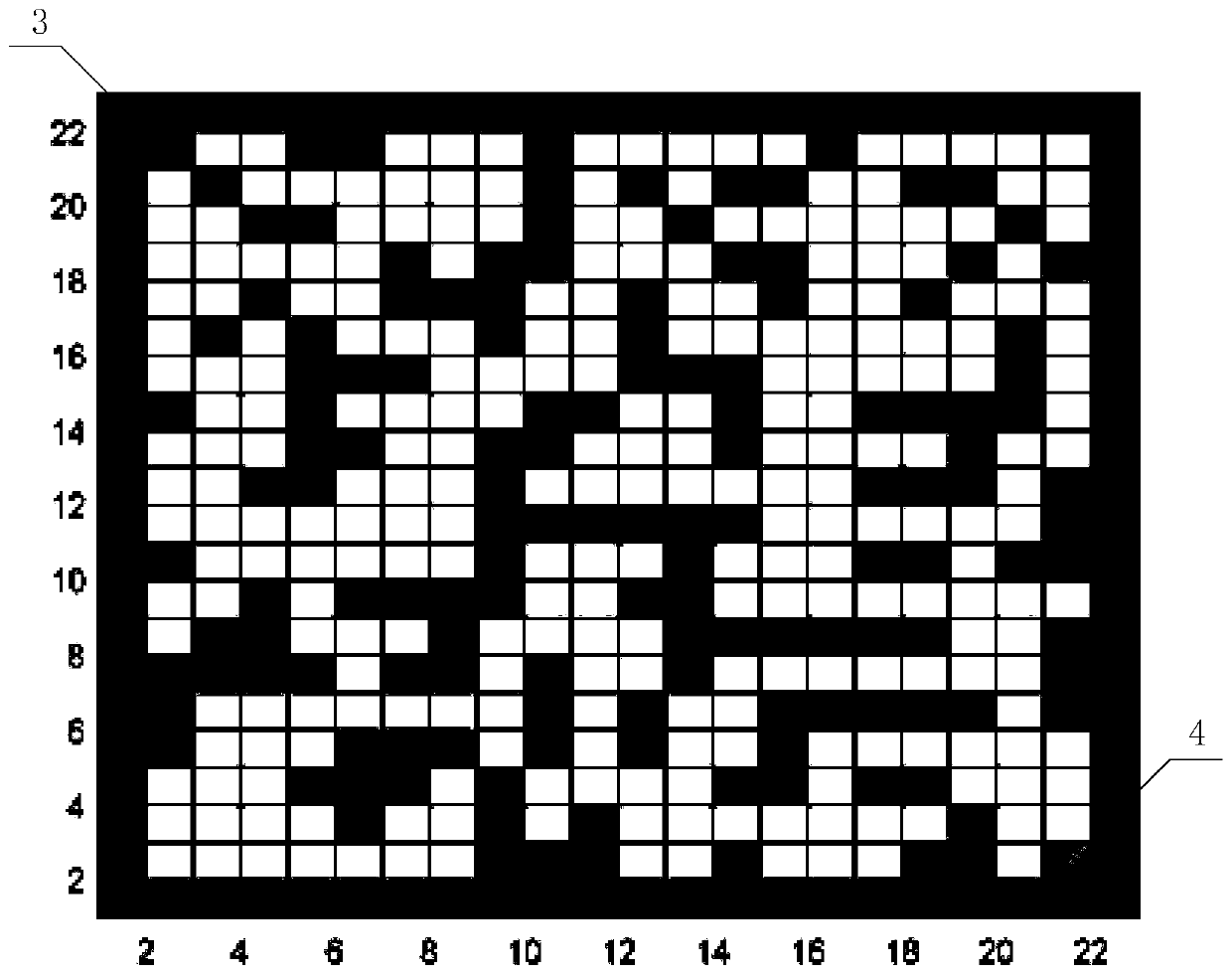
[0053] Step 3. Establish a binary grid map according to the obtained environmental obstacle information, in which the passabl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com