Double-side coordination training system and control method
A bilateral, controller technology, applied in the field of robotics, can solve problems such as functional decline, lack of limb movement, and little bilateral coordination training of limbs, and achieve the effect of improving ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
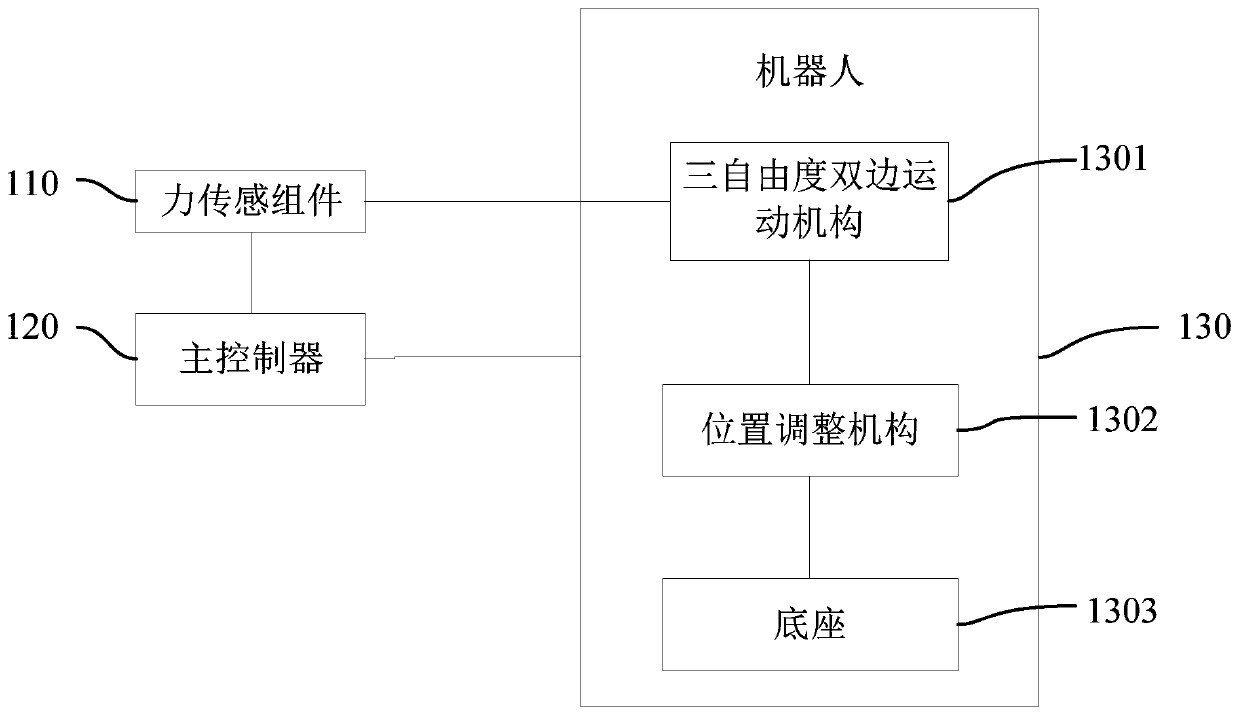
[0027] Figure 1a The schematic diagram of the bilateral coordination training system provided by Embodiment 1 of the present invention, this embodiment is applicable to the situation of performing bilateral coordination training of limbs to all groups of people, wherein the bilateral coordination training of limbs can be bilateral coordination training of upper limbs, or bilateral coordination training of lower limbs ,Such as Figure 1a As shown, the bilateral coordination training system includes:
[0028] The main controller 120 , the force sensing component 110 and the robot 130 , wherein the main controller 120 is connected to the force sensing component 110 and the robot 130 respectively.
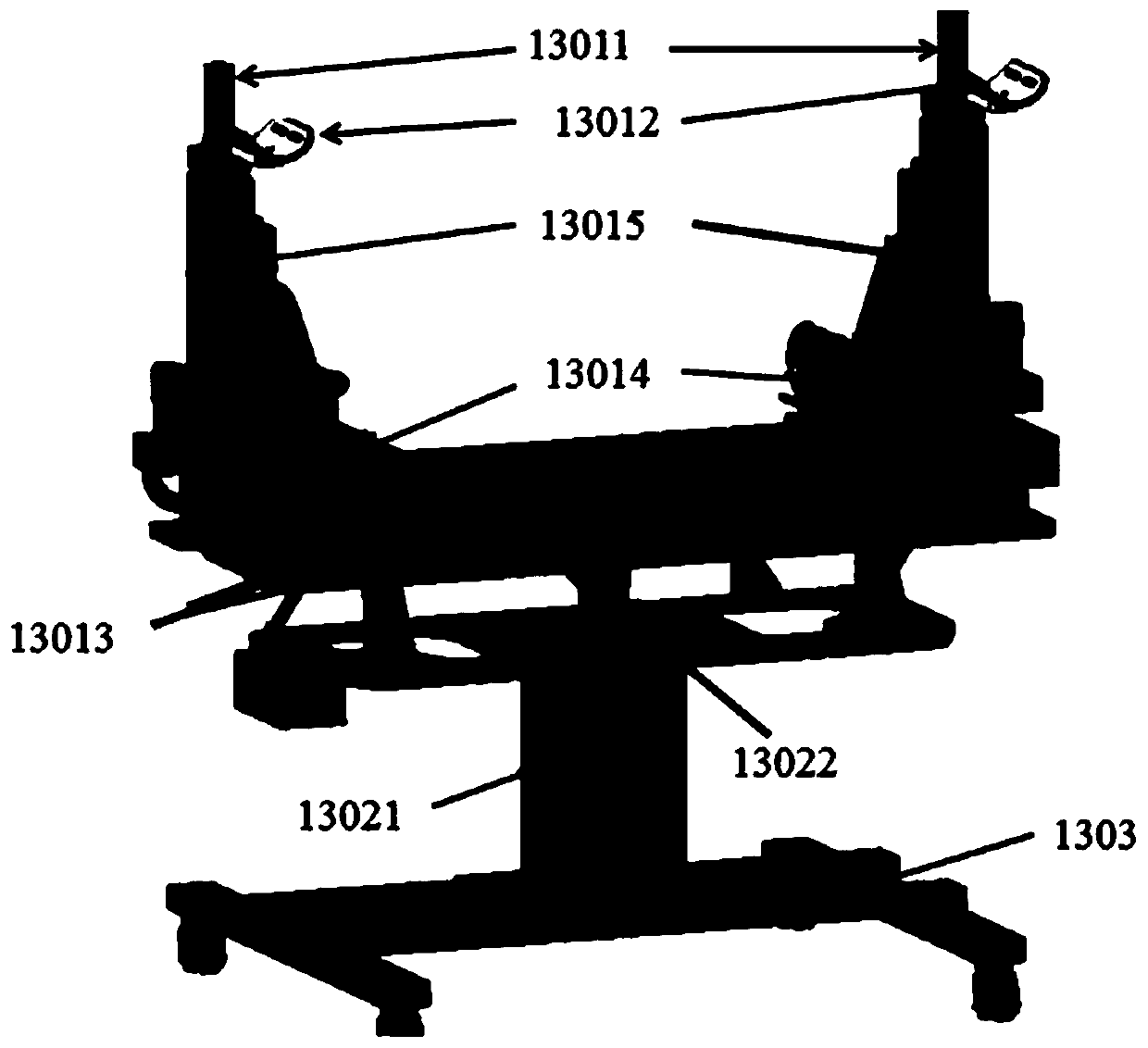
[0029] Further, the robot 130 includes: a base 1303 , a position adjustment mechanism 1302 fixed on the base 1303 and a three-degree-of-freedom bilateral motion mechanism 1301 . Optionally, the robot 130 may be a bilateral coordination training robot, including bilateral robots such a...
Embodiment 2
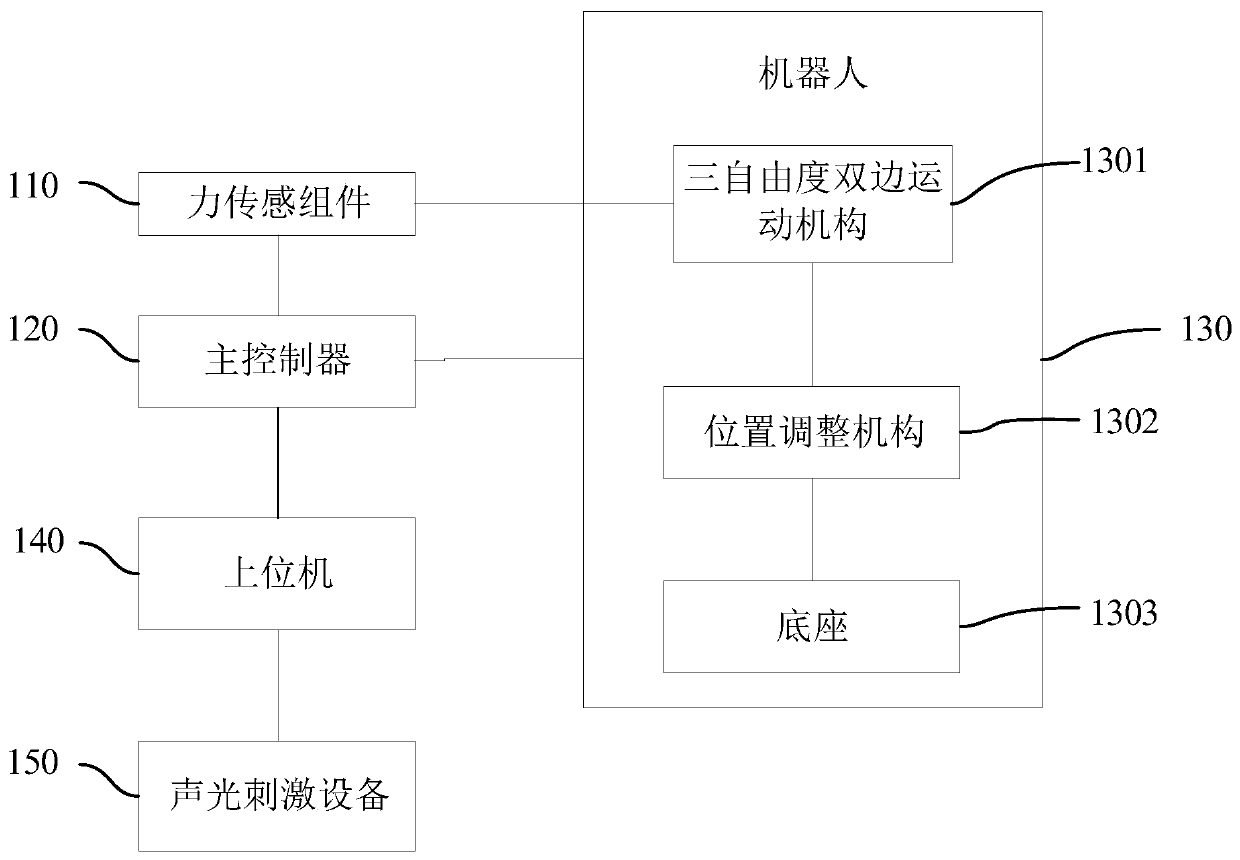
[0046] figure 2 It is a schematic diagram of the bilateral coordination training system provided by Embodiment 2 of the present invention. On the basis of the above embodiments, the bilateral coordination training system further includes: a host computer 140 and an acousto-optic stimulation device 150 . Such as figure 2 shown. The bilateral coordination training system includes: a main controller 120 , a force sensor component 110 , a bilateral coordination training robot 130 , a host computer 140 and an acousto-optic stimulation device 150 .
[0047] Wherein, the main controller 120 is respectively connected with the force sensing component 110 and the bilateral coordination training robot 130 , the upper computer 140 is connected with the main controller 120 , and the sound and light stimulation device 150 is connected with the upper computer 140 .
[0048] The bilateral coordination training robot 130 includes: a base 1303, a position adjustment mechanism 1302 fixed on ...
Embodiment 3
[0065] On the basis of the above-mentioned embodiments, the embodiments of the present invention describe in more detail the control procedures for training bilateral unrelated exercises, bilateral flexible associated exercises, and bilateral rigid associated exercises using the bilateral coordination training system.
[0066] Figure 4 It is the control flow diagram of applying the bilateral coordination training system in Embodiment 3 of the present invention to carry out bilateral unrelated exercise training, as Figure 4 As shown, it specifically includes the following steps:
[0067] S402, initialization of bilateral unrelated exercise training parameters.
[0068] The bilateral unrelated exercise training is to simulate the bilateral coordination training process, and there is no connection between the left and right operating handles 13011.
[0069] Optionally, training parameters corresponding to different exercise modes are preset in the host computer 140 . After t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com