Direct control method for two-wheeled robot
A control method and robot technology, applied in two-dimensional position/channel control, non-electric variable control, control/regulation system, etc., can solve problems such as low control accuracy, inability to directly and easily control, and numerous parameters, and achieve improved control The effect of precision, simple and direct design method, and few parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
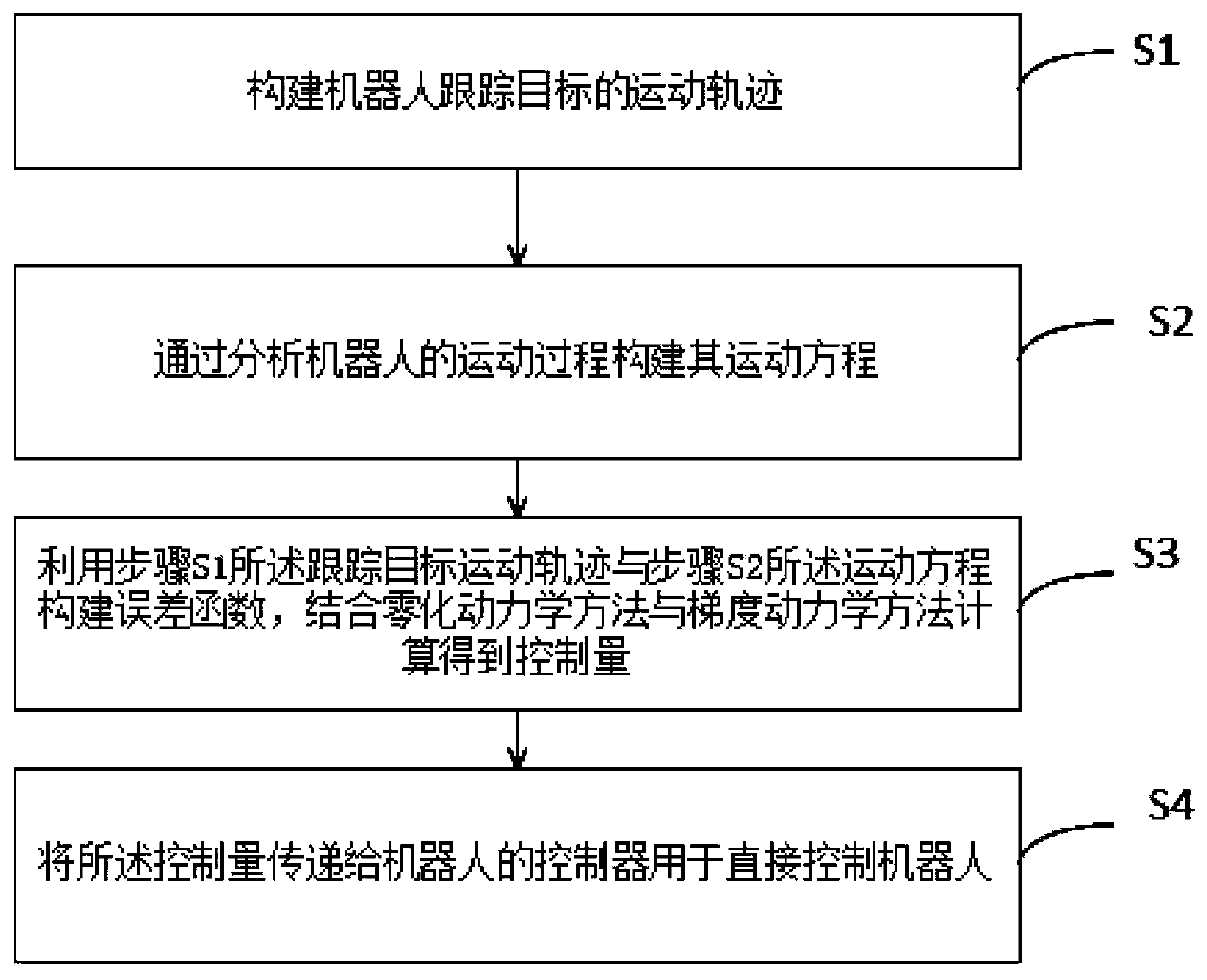
[0041] figure 1 A flow chart of a direct control method for a two-wheeled mobile robot is shown.
[0042] A direct control method for a two-wheeled robot, comprising the following steps:
[0043] S1: Determine the trajectory of the robot tracking target;
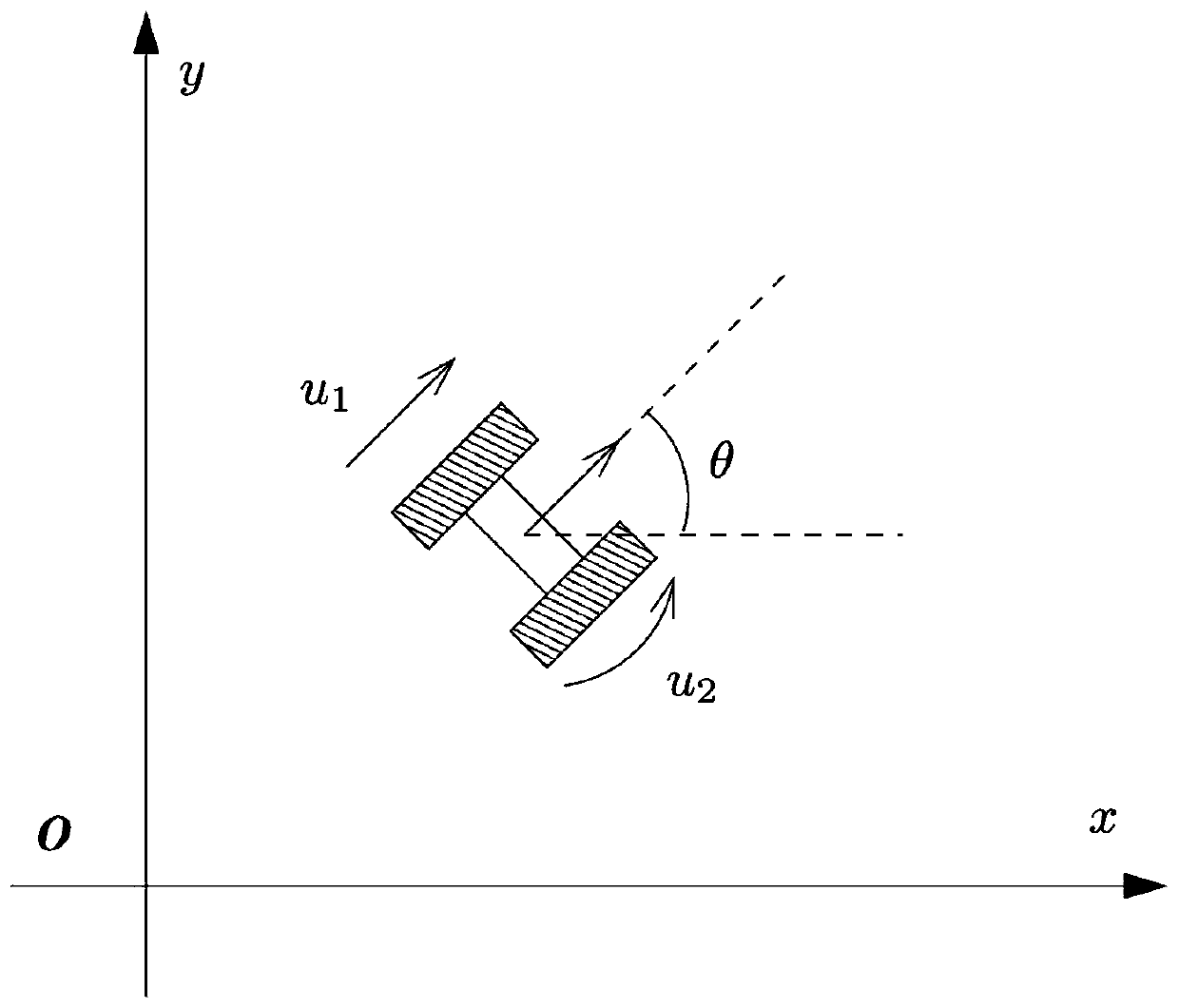
[0044] S2: Construct the robot motion equation by analyzing the motion process of the robot;
[0045] S3: constructing an error function by using the tracking target motion trajectory described in step S1 and the motion equation described in step S2, and calculating the control amount by combining the zeroing dynamics method and the gradient dynamics method;
[0046] S4: Transfer the control amount to the controller of the robot for direct control of the robot.
[0047] In this scheme, the trajectory of the robot tracking the target described in step S1 is expressed as r d =[x d ,y d ] T ,
[0048] where x d Indicates the target trajectory in the x direction, y d Indicates the target trajectory in the y direction. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com