A Deviation Coupling Control Method Based on Sliding Mode Controller
A technology of deviation coupling and control method, applied in the direction of controlling multiple AC motors, multiple motor speed/torque control, etc., can solve problems such as complex actual working conditions, achieve fast response speed, and eliminate tracking errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
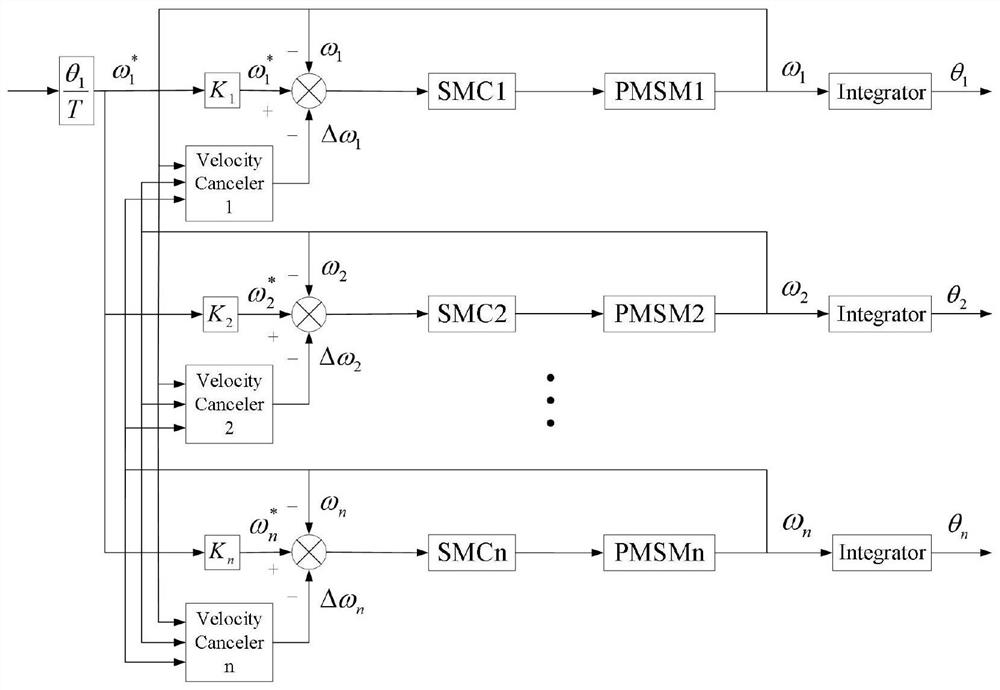
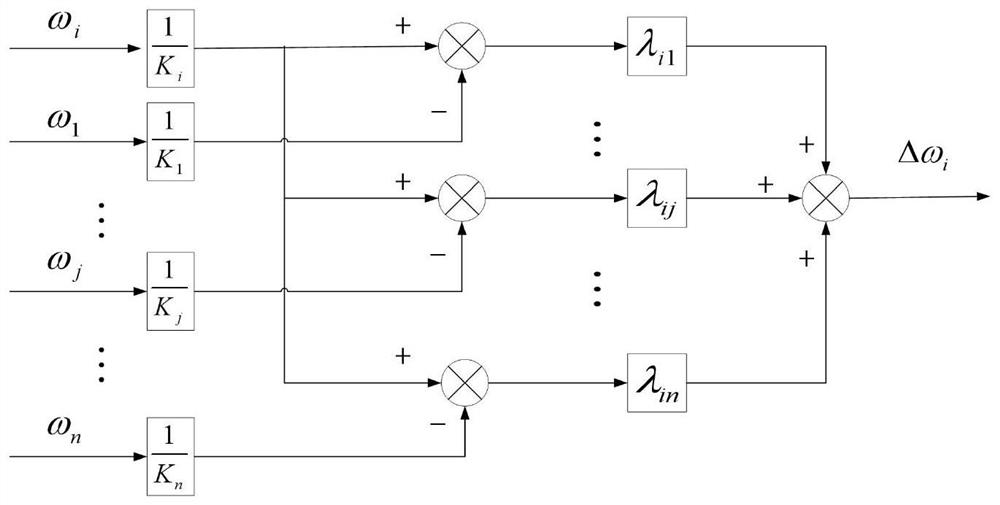
[0032] The embodiment of the present invention adopts a deviation coupling control strategy and uses a speed compensator based on a fixed gain to perform real-time speed compensation on the running system, and ensure synchronous operation among servos while eliminating system tracking errors.
[0033] A kind of deviation coupling control strategy based on sliding mode controller, comprising the following steps:
[0034] The first step is to design the speed co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com