A Swing Suppression Method for UAV Suspension System Using Tether/Thrust Coordination
A technology for hoisting and system controller, applied in control/adjustment system, general control system, adaptive control and other directions, can solve the problems of position and attitude error of multi-rotor UAV hoisting system, and achieve good swing suppression effect, to meet precise trajectory tracking, to avoid the effect of conflicting requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0031] The technical scheme adopted in the present invention comprises the following steps:
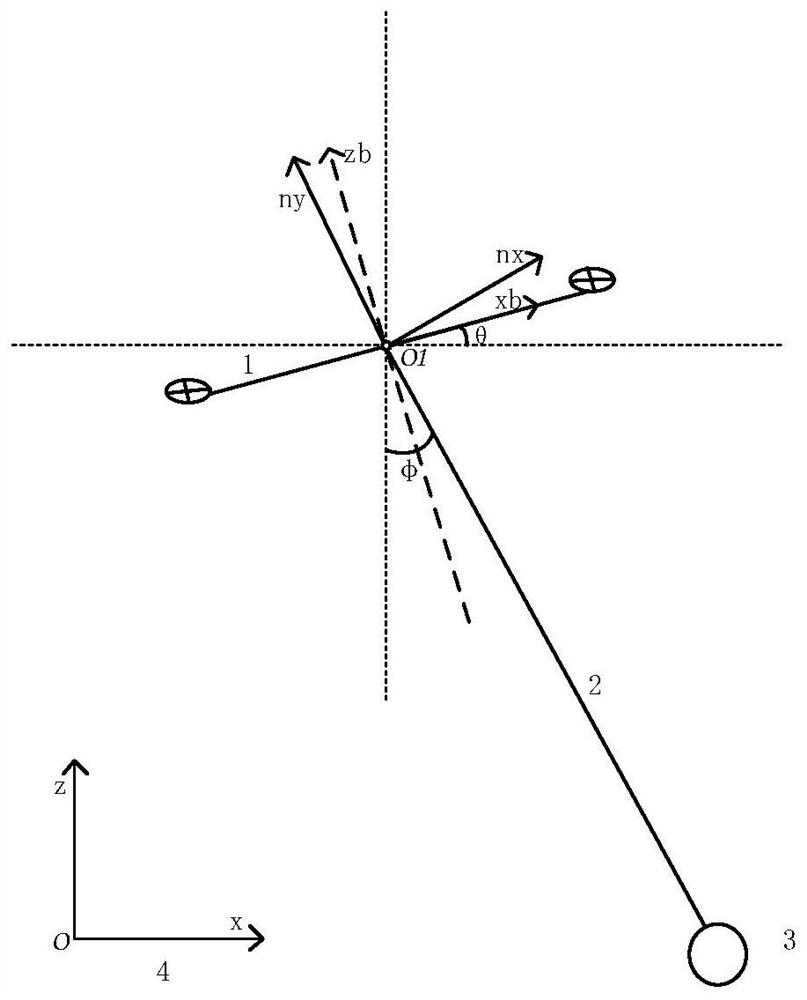
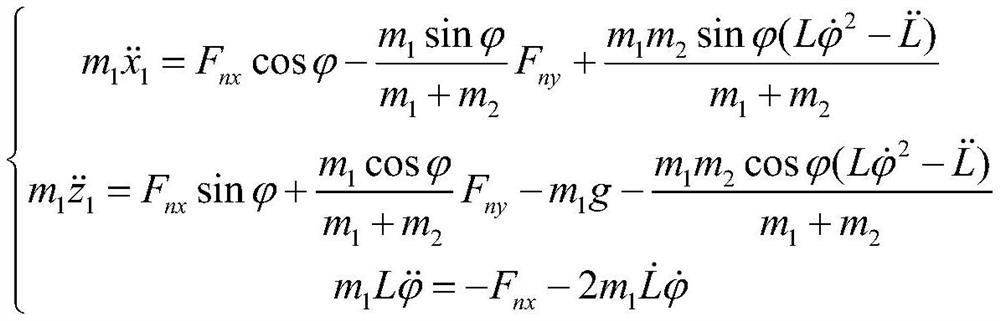
[0032] Step 1: Establish a dynamic model of the multi-rotor UAV suspension system with tether retractable motion
[0033] Assumptions: 1. Since the tether is always in a tight state during the movement, the elasticity, flexibility and quality of the tether are ignored;
[0034] 2. Ignore the posture of the hanging object, and regard the hanging object as a mass point;
[0035] 3. The connection point between the tether and the multi-rotor UAV coincides with the center of mass of the UAV.
[0036] 4. Since the in-plane and out-of-plane swing angles of the tether can be decoupled, the out-of-plane swing is ignored
[0037] The process of UAV hanging flight movement is attached figure 1 As shown, 1 is a multi-rotor UAV, 2 is a tether, 3 is a hanging object, and 4 is an ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com