Nonsingular adaptive non-smooth attitude tracking control method for unmanned aerial vehicle
A tracking control and non-smooth technology, which is applied in the direction of adaptive control, attitude control, non-electric variable control, etc., can solve the problems that the control quality is greatly affected by disturbance, does not have self-adaptive ability, and is difficult in engineering application, so as to improve the Rapidity and anti-disturbance ability, good attitude tracking dynamic and static quality, improved robustness and control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0041] In order to more clearly illustrate the embodiments of the present invention and the technical solutions in the prior art, the specific implementation manners of the present invention will be described below with reference to the accompanying drawings. Obviously, the accompanying drawings in the following description are only some embodiments of the present invention, and those skilled in the art can obtain other accompanying drawings based on these drawings and obtain For other embodiments, the present invention is not limited to this example.
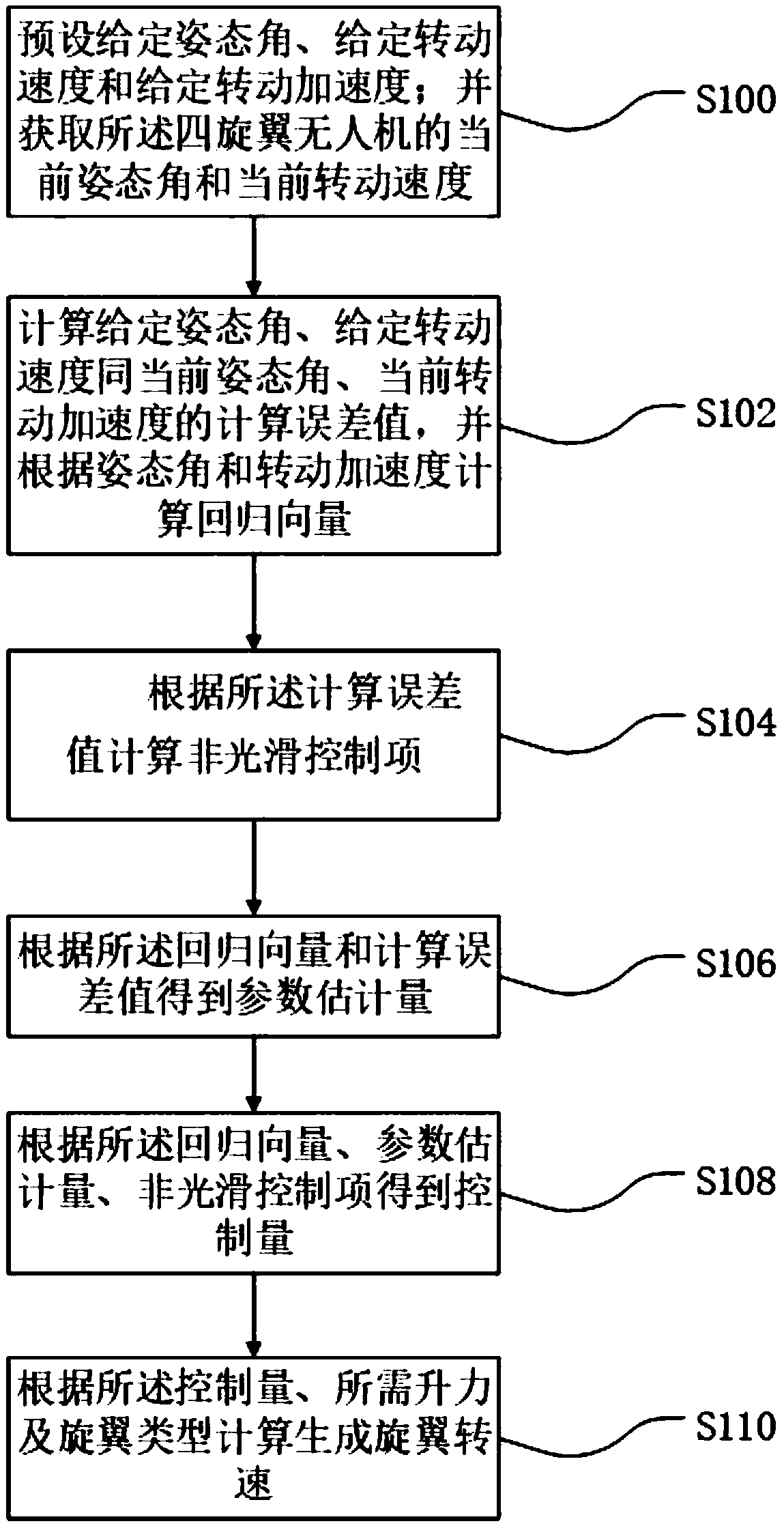
[0042] refer to figure 1 The flow chart of the non-singular adaptive non-smooth attitude tracking control method of the UAV shown, the method is applied to the processor of the quadrotor UAV, including:
[0043] S100, preset a given attitude angle, a given rotational speed and a given rotational acceleration; and acquire the current attitude angle and current rotational speed of the quadrotor UAV;
[0044] Specifically:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com