A side slip compensation method and system for an automatic driving vehicle
A technology of automatic driving and compensation method, applied in vehicle components, circuits or fluid pipelines, transportation and packaging, etc., can solve problems such as untimely side slip control, and achieve the effect of avoiding accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
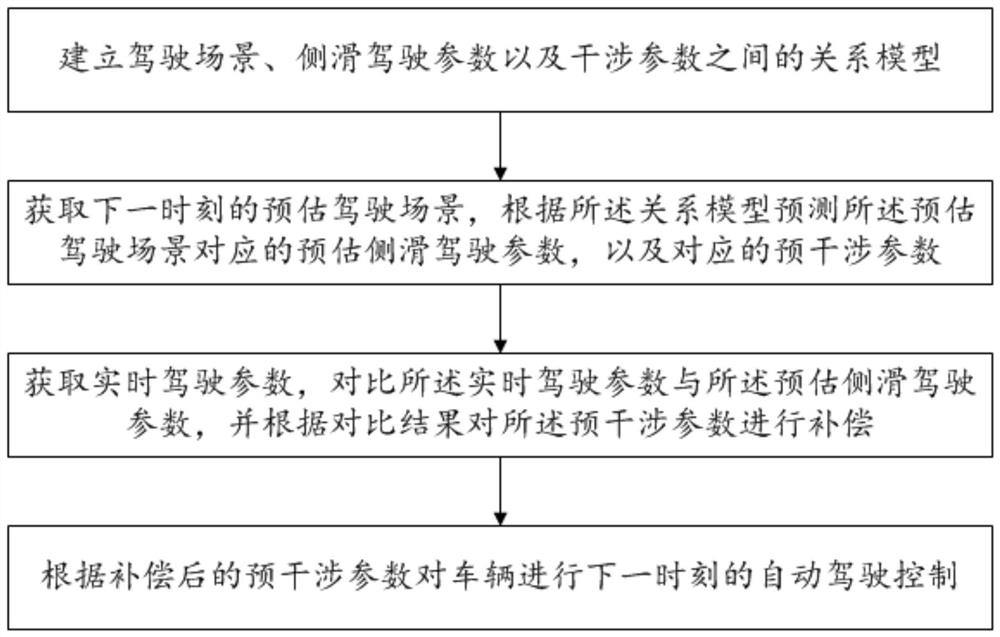
[0019] Such as figure 1 As shown, Embodiment 1 of the present invention provides a sideslip compensation method for an automatic driving vehicle, comprising the following steps:
[0020] Establish a relationship model among driving scenarios, sideslip driving parameters and interference parameters;
[0021] Acquiring the estimated driving scene at the next moment, predicting the estimated sideslip driving parameter corresponding to the estimated driving scene and the corresponding pre-intervention parameter according to the relationship model;
[0022] Acquiring real-time driving parameters, comparing the real-time driving parameters with the estimated sideslip driving parameters, and compensating the pre-intervention parameters according to the comparison result;
[0023] According to the pre-intervention parameters after compensation, the automatic driving control of the vehicle at the next moment is carried out.
[0024] The present invention firstly establishes the relat...
Embodiment 2
[0039] Embodiment 2 of the present invention provides a sideslip compensation system for an automatic driving vehicle, including a modeling module, an estimation module, a compensation module and a control module;
[0040] The modeling module is used to establish a relationship model among driving scenarios, sideslip driving parameters and interference parameters;
[0041] The estimation module is used to obtain the estimated driving scene at the next moment, predict the estimated sideslip driving parameters corresponding to the estimated driving scene according to the relationship model, and the corresponding pre-intervention parameters;
[0042] The compensation module is used to obtain real-time driving parameters, compare the real-time driving parameters with the estimated sideslip driving parameters, and compensate the pre-intervention parameters according to the comparison result;
[0043] The control module is used for performing automatic driving control on the vehicle...
Embodiment 3
[0048] Embodiment 3 of the present invention provides a computer storage medium, on which a computer program is stored. When the computer program is executed by a processor, the sideslip compensation method for an automatic driving vehicle provided in any of the above embodiments is implemented.
[0049] The computer storage medium provided by the present invention is used to realize the sideslip compensation method of the self-driving vehicle. Therefore, the technical effects of the above-mentioned sideslip compensation method of the self-driving vehicle are also provided by the computer storage medium, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com