A Cosine Interpolation Method for Industrial Robots Running in a Straight Line in Space
A technology of industrial robots and robots, applied in instruments, simulators, computer control, etc., can solve problems such as infinite jerk and sudden acceleration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
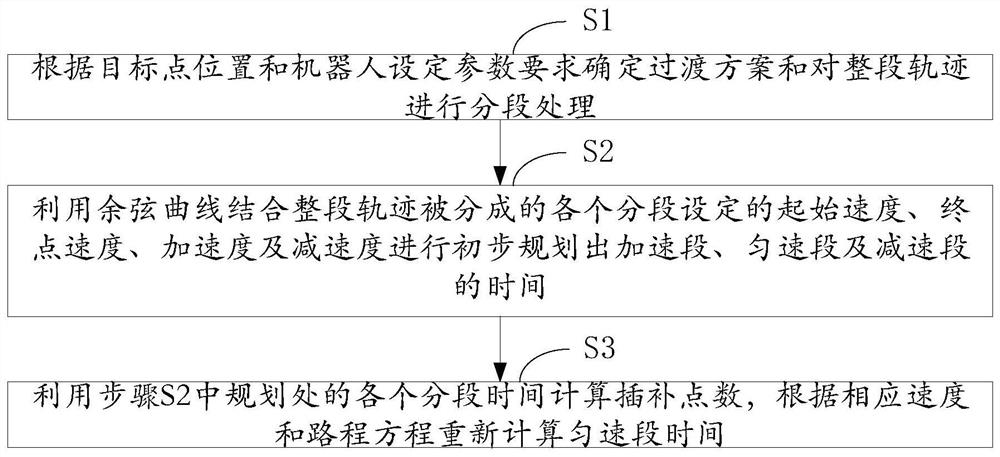
[0027] Such as Figure 1-2 As shown, the cosine interpolation method of the industrial robot provided by the present invention under the linear operation in space is described in detail as follows:
[0028] Step S1, according to the position of the target point and the requirements of the robot setting parameters, determine the transition plan and process the entire trajectory in segments; in industry, more and more jobs are performed by robots, and interpolation processing is required during the robot movement process. According to the requirements between the point coordinates of the target position and the robot setting parameters, the determined trapezoidal transition scheme and the entire path trajectory should be segmented. In the process of segmentation, according to the commonly used trapezoidal Motion trajectory, divide the entire path of robot movement into P1→P2→P3→P4, and then from P4→P3→P2→P1, here the interpolation analysis is performed on the trajectory of P1→P2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com