Bio-inspired self-organizing mapping path planning method of autonomous underwater vehicle under ocean circulation
An underwater vehicle and self-organizing mapping technology, which is applied in the direction of instruments, navigation, surveying and navigation, etc., can solve problems such as impact, and achieve the effects of reducing power consumption, saving power consumption, and improving office efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
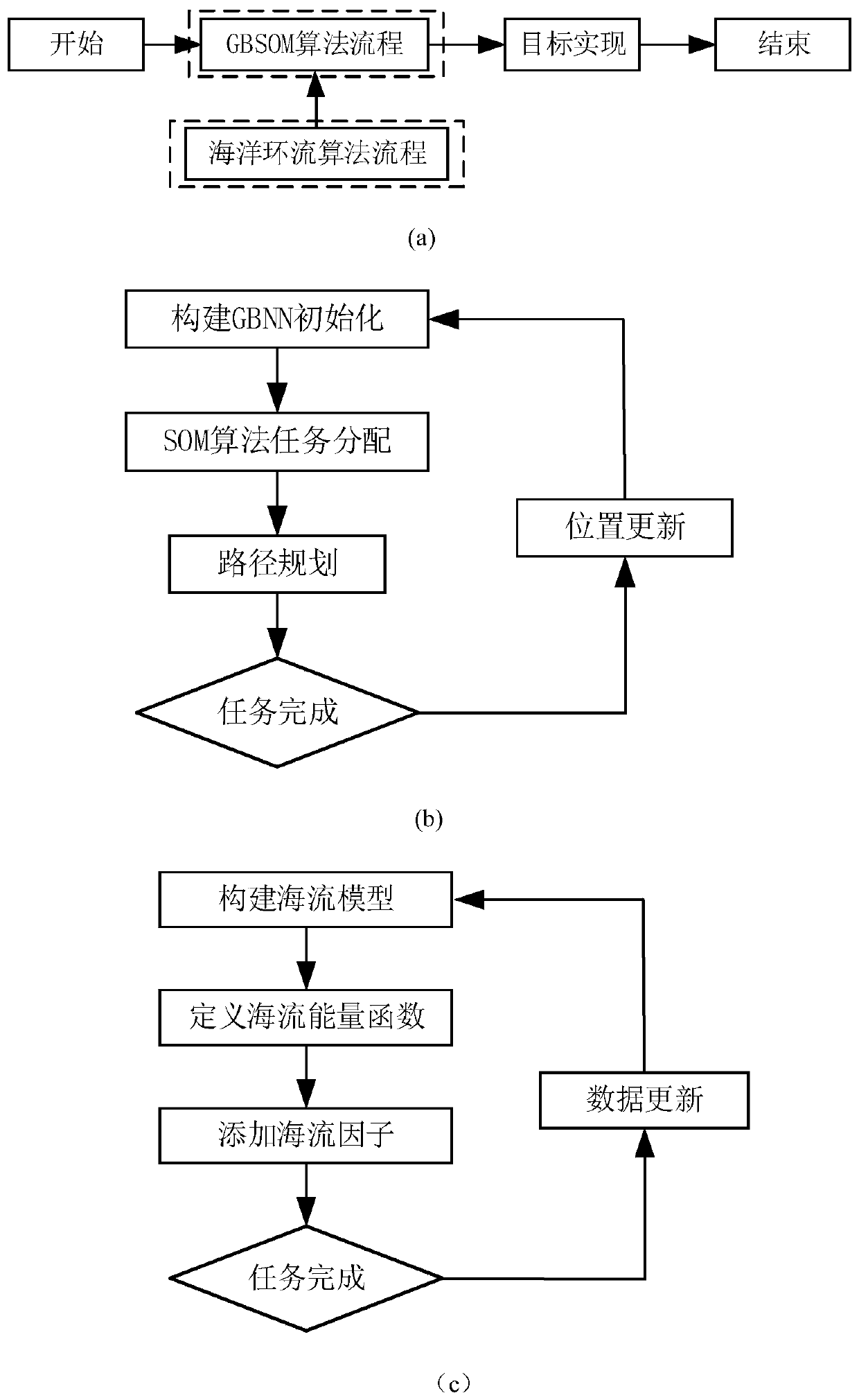
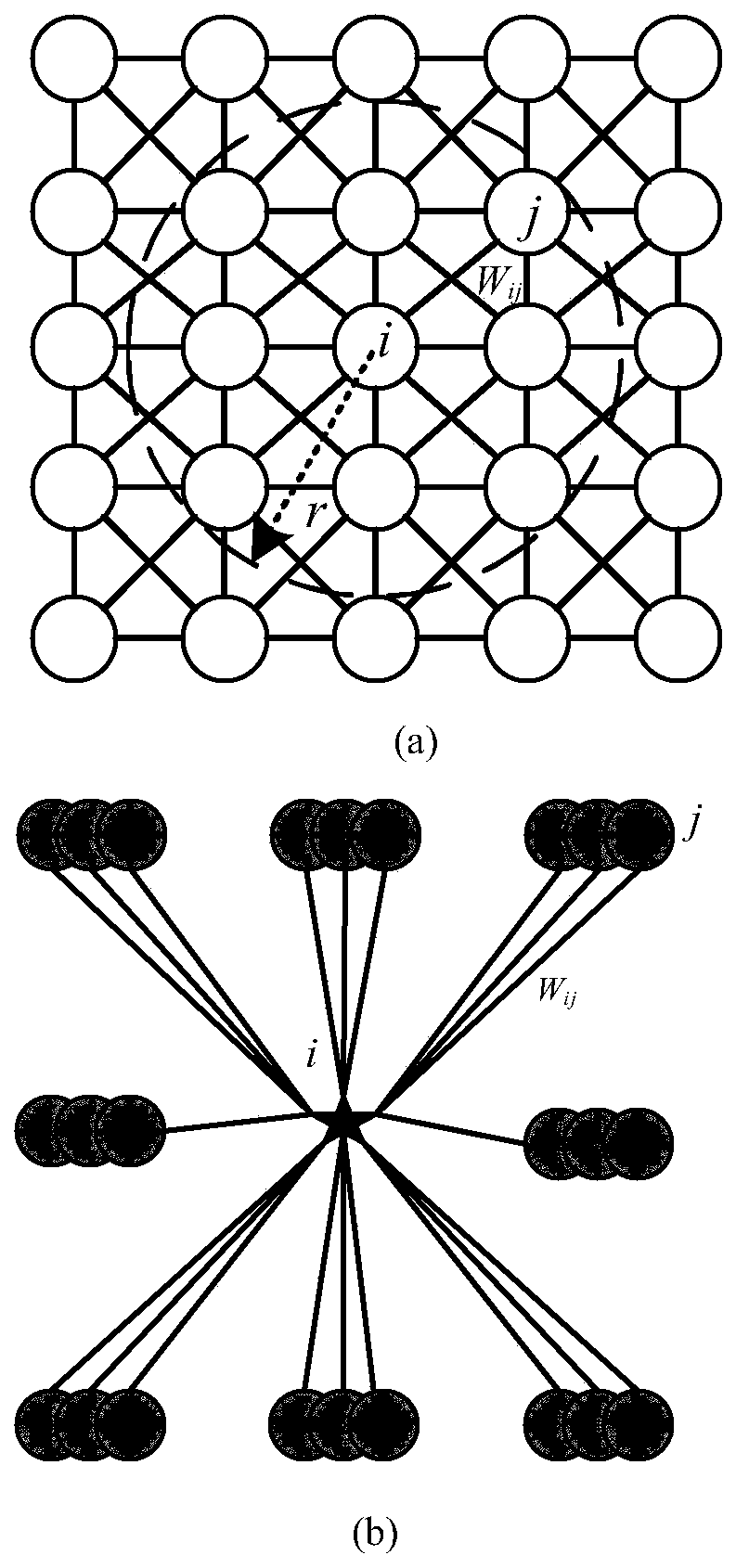
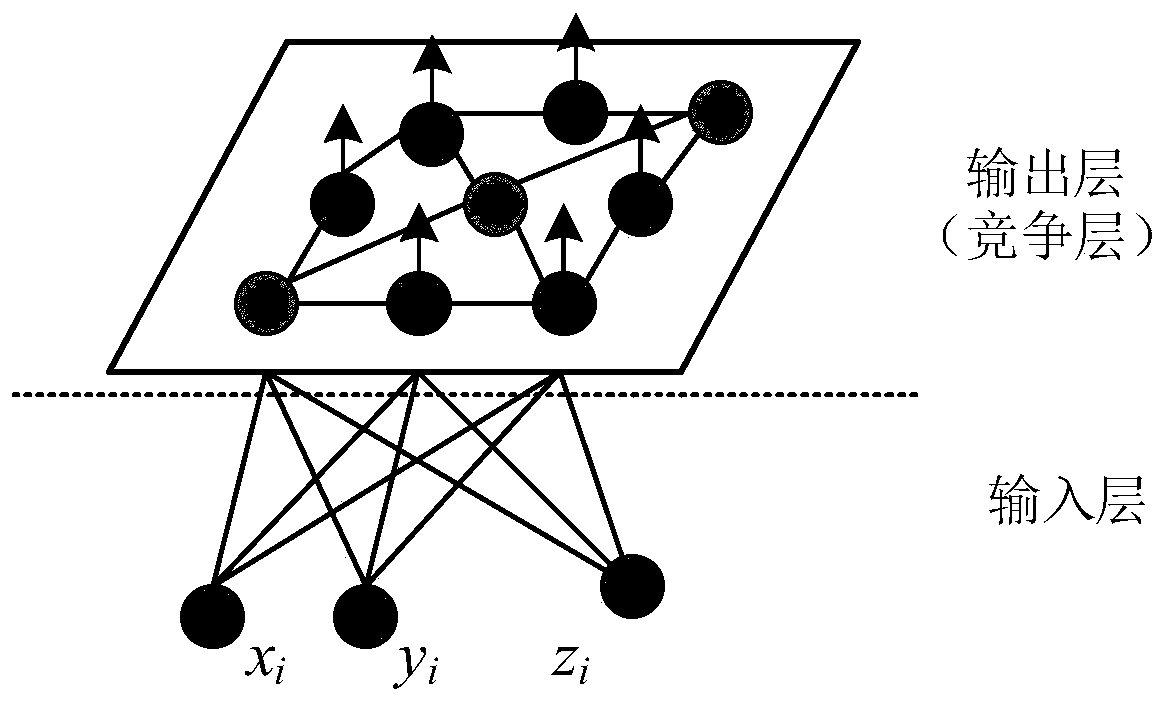
[0053] Such as figure 1 As shown, the bio-inspired self-organizing mapping path planning method for autonomous underwater vehicles under ocean circulation combines the path planning algorithm with ocean circulation to jointly determine the operating path of the AUV. Such as figure 1 (a), first combine the GBNN algorithm and the SOM algorithm, use the GBNN to construct the underwater environment model, use the SOM algorithm to assign tasks, and finally determine the task target according to the output of the activity value. Secondly, considering the factor of ocean circulation, by constructing the ocean current model and defining the ocean current energy function, the influence of the ocean environment on the operation of the AUV is simulated. Finally, by adding the ocean current factor, the AUV can find a safe, barrier-free and power-saving e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com