Single-arm and double-arm auxiliary minimally invasive surgical operation robot and cooperative combined robot system
A surgical robot and minimally invasive surgery technology, applied in surgical robots, surgical manipulators, etc., to optimize the overall force balance and prevent bending moments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
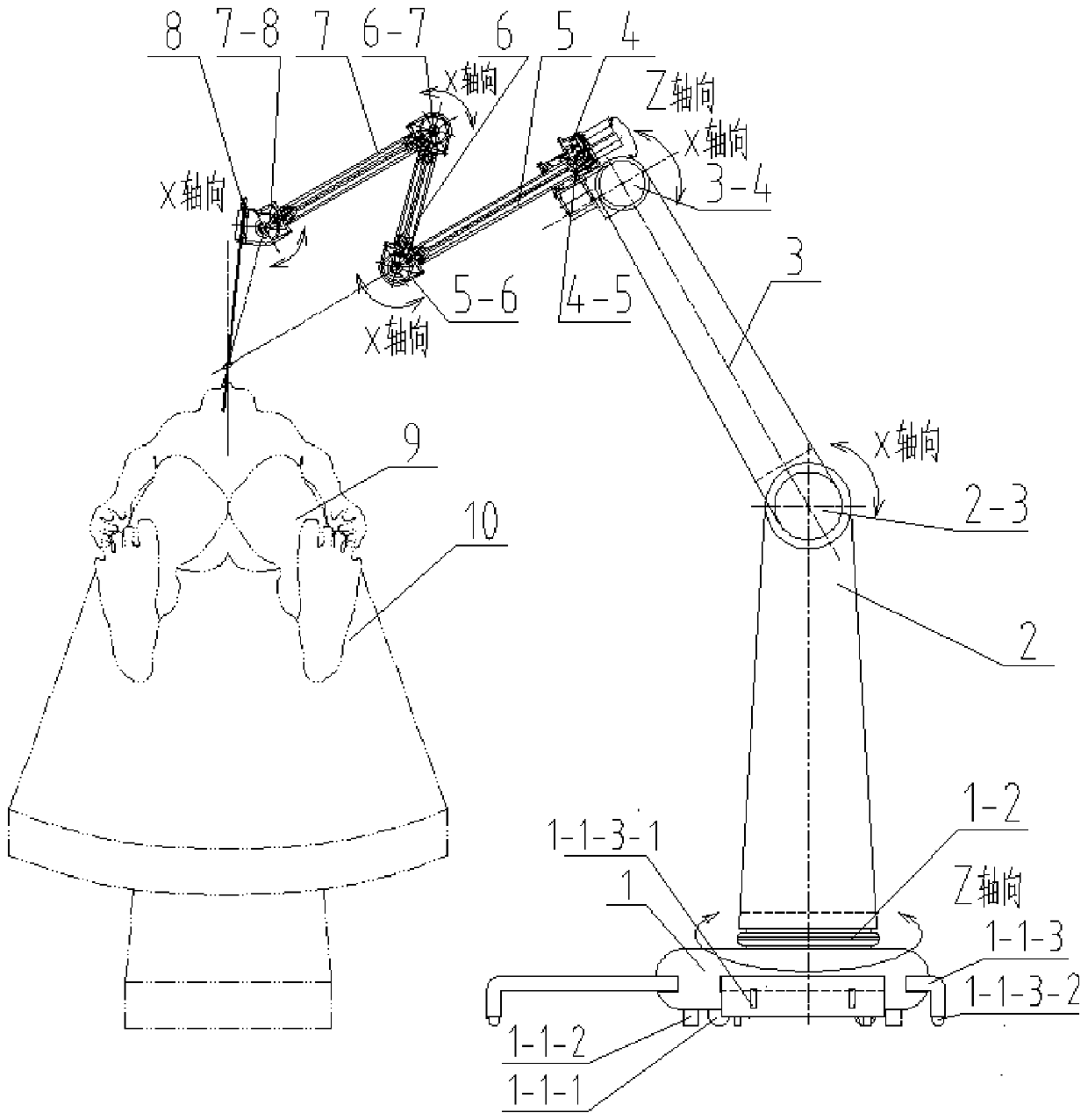
[0069] Such as Figure 1 to Figure 18 As shown, in order to solve the flexibility of the layout of the auxiliary minimally invasive surgical robot in the working state and the balance of the overall structure of the auxiliary minimally invasive surgical robot in the non-working state, the rationality of the force of the parts and the protection of surgical instruments and To assist the optimization of the overall space occupation of minimally invasive surgical robots, the present invention proposes a single arm that is easy to disassemble, flexible to adjust, accurate in positioning, relatively large in rigidity, reasonable in force, optimized in layout, convenient in transportation, and long in service life. The collaborative auxiliary minimally invasive surgical robot, through the optimized structural layout, enables the auxiliary minimally invasive surgical robot to coordinate the layout in the working state so that the operating arm can reach the target position of the pati...
Embodiment 2
[0085] The specific structure is as Figure 19 Shown:
[0086] On the basis of Example 1, the figure 1 The arm section one 3, the arm section two 4, the swivel joint 2-3, and the swivel joint 3-4 between the arm section three 5 and the column 2 described in the above are replaced by Figure 15 Middle arm section 1 3-1, arm section 2 3-2, arm section 3 3-3, arm section 4 3-4 and moving joint 2-3-1, rotating joint 3-1-3-2, rotating joint 3 -1-3-3, revolving joint 3-1-3-4, while removing the revolving joint 1-2 between the column 2 and the base 1 in embodiment 1, the rest of the structure remains unchanged, The function of the operating arm for positioning the surgical instrument for surgical operations can also be realized.
[0087] In the working state, the arm section one 3-1 can move the joint 2-3- 1. Move to a suitable height in the vertical direction, the first arm segment 3-1, the second arm segment 3-2, and the third arm segment 3-3 can pass through the rotating joint...
Embodiment 3
[0089] This embodiment provides a collaborative combined robot system, including at least two single-arm assisted minimally invasive surgical robots described in Embodiment 1 and Embodiment 2. For example, four or more single-arm combined cooperative minimally invasive surgical robots can be used to cooperate in surgical operations according to surgical requirements. Taking four single-arm combined collaborative minimally invasive surgical robots as an example, the described The single-arm combined collaborative minimally invasive surgical robot can be flexibly arranged according to the surgical needs, and can be placed on one side of the operating bed; two can be placed on one side of the operating bed, and the other two can be placed on the other side of the operating bed; Three can be placed on one side of the operating table, and the other can be placed on the other side of the operating table.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com