Bionic chewing motion mechanism with double Hooker hinges
A kinematic mechanism and simulation technology, applied in the field of bionic robots, can solve the problems that the accuracy and accuracy of simulated actions cannot be guaranteed, and the mandible movement and biomechanical characteristics cannot be truly reproduced.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments.
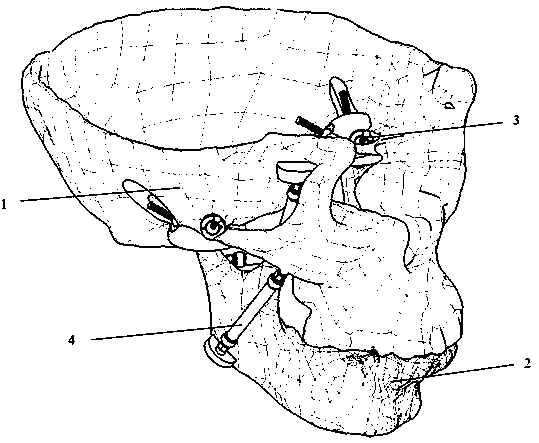
[0029] Such as figure 1 As shown, a bionic mastication mechanism with a double Hooke hinge includes a maxilla model 1, a mandible model 2, two bionic temporomandibular joints 3 and a simulation muscle group 4, and the maxilla model 1 is respectively arranged on the mandible Two groups of bionic temporomandibular joints 3 on both sides of the bone model 2 are connected with the mandible model 2;
[0030] In this example, the 1:1 skull model composed of the maxilla model 1 and the mandible model 2 was processed based on the CT scan of the skull of a healthy adult, as shown in Figure 4 and Figure 5 As shown, the maxilla model 1 and the mandible model 2 obtained after processing are respectively; the maxilla model 1 is fixed, and the mandible model 2 can move around two bionic temporomandibular joints 3 driven by the simulated muscle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com