


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
An intelligent robot for harvesting garlic sprouts and its working method
An intelligent robot and robot technology, applied in harvesters, agricultural machinery and implements, agriculture, etc., can solve problems such as unconsidered continued growth of garlic heads, easily crushed garlic sprouts, broken garlic stems or pulled out whole plants, etc., to achieve harvesting Remarkable effect on yield and quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
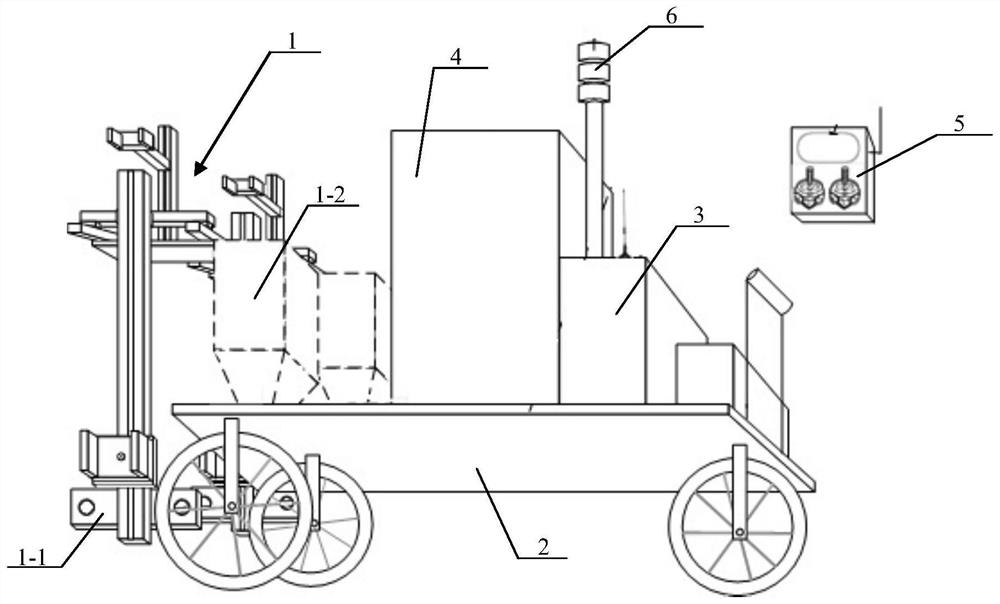
[0056] like Figure 1-3 As shown, an intelligent robot for harvesting garlic sprouts includes a harvesting device 1, a mobile platform 2, a control system 3 and a power system 4 that provides power for the robot;
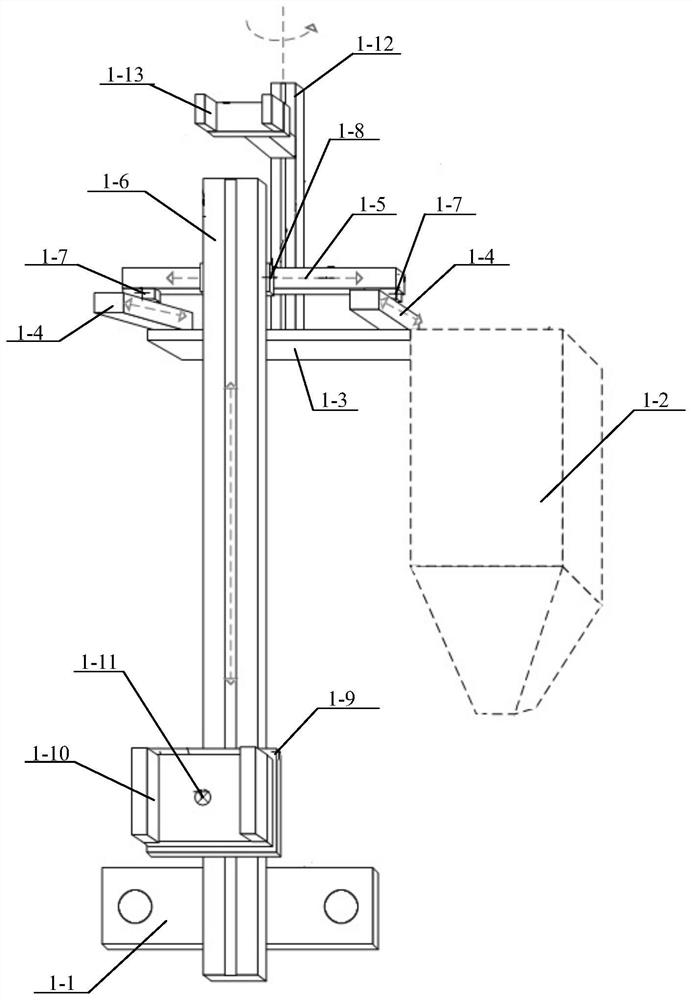
[0057] The mobile platform 2 is a mobile vehicle body, the power system 4 and the control system 3 are located above the mobile platform 2, and there are multiple harvesting devices 1, which are located at the front end of the mobile platform 2 in a flush manner, and multiple harvesting devices 1 can be performed in parallel. combined operation to improve harvesting efficiency; each harvesting device 1 includes a three-dimensional three-dimensional sliding table, a clipping and tying component, an identification and positioning component 1-1, a stalk feeding component and a garlic stalk container 1-2;
[0058] The three-dimensional slide table, the clip-lifting and tying components, the identification and positioning components 1-1, the feeding components, the mobil...
Embodiment 2
[0060] An intelligent robot for harvesting garlic sprouts, the structure is as shown in Embodiment 1, the difference is that the intelligent robot for harvesting garlic sprouts also includes a remote control 5, and the remote control 5 is connected with the control system 3 through wireless communication;
[0061] The mobile platform 2 adopts a high-footed tricycle body, and the wheels adopt solid rubber narrow tires;
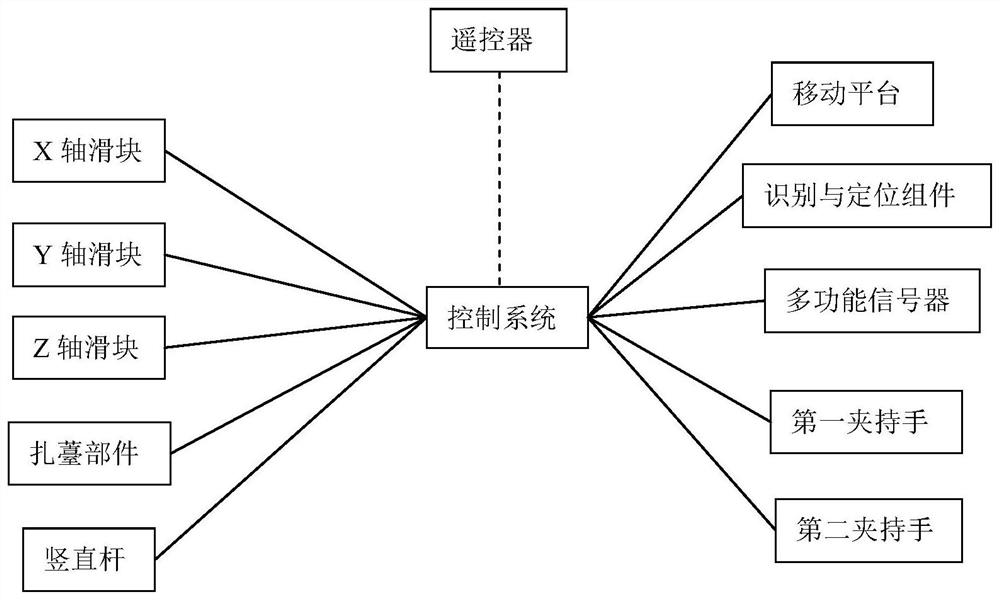
[0062] The robot also includes a multifunctional annunciator 6 for indicating the working state of the robot. The harvesting device 1 , the control system 3 , the power system 4 and the multifunctional annunciator 6 are all integrated and installed on the mobile platform 2 , and the robot is realized by the mobile platform 2 . For traveling and turning, the multi-function annunciator 6 is also connected to the control system 3;
[0063] The control system 3 is a collection of software algorithms and hardware boards with an embedded computer (ARM, etc.) as the c...
Embodiment 3
[0065] like figure 2 As shown, an intelligent robot for harvesting garlic sprouts, as shown in Embodiment 1, the difference is that the garlic sprouts container 1-2 is located at the front end position on the mobile platform 2, and the garlic sprouts container 1-2 is fixedly provided with a base 1-3 , the three-dimensional three-dimensional slide table is located on the base 1-3.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com