Global smooth path planning method for mobile robot
A mobile robot and global smoothing technology, applied in the field of robotics, can solve problems such as high computational speed requirements of neural network algorithms, affect the work efficiency of mobile robots, and not adapt to multi-objective optimization, etc., to achieve improved search accuracy, easy implementation, and short paths Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0063] In the following, the present invention will be specifically described through exemplary embodiments. It should be understood, however, that elements, structures and characteristics of one embodiment may be beneficially incorporated in other embodiments without further recitation.
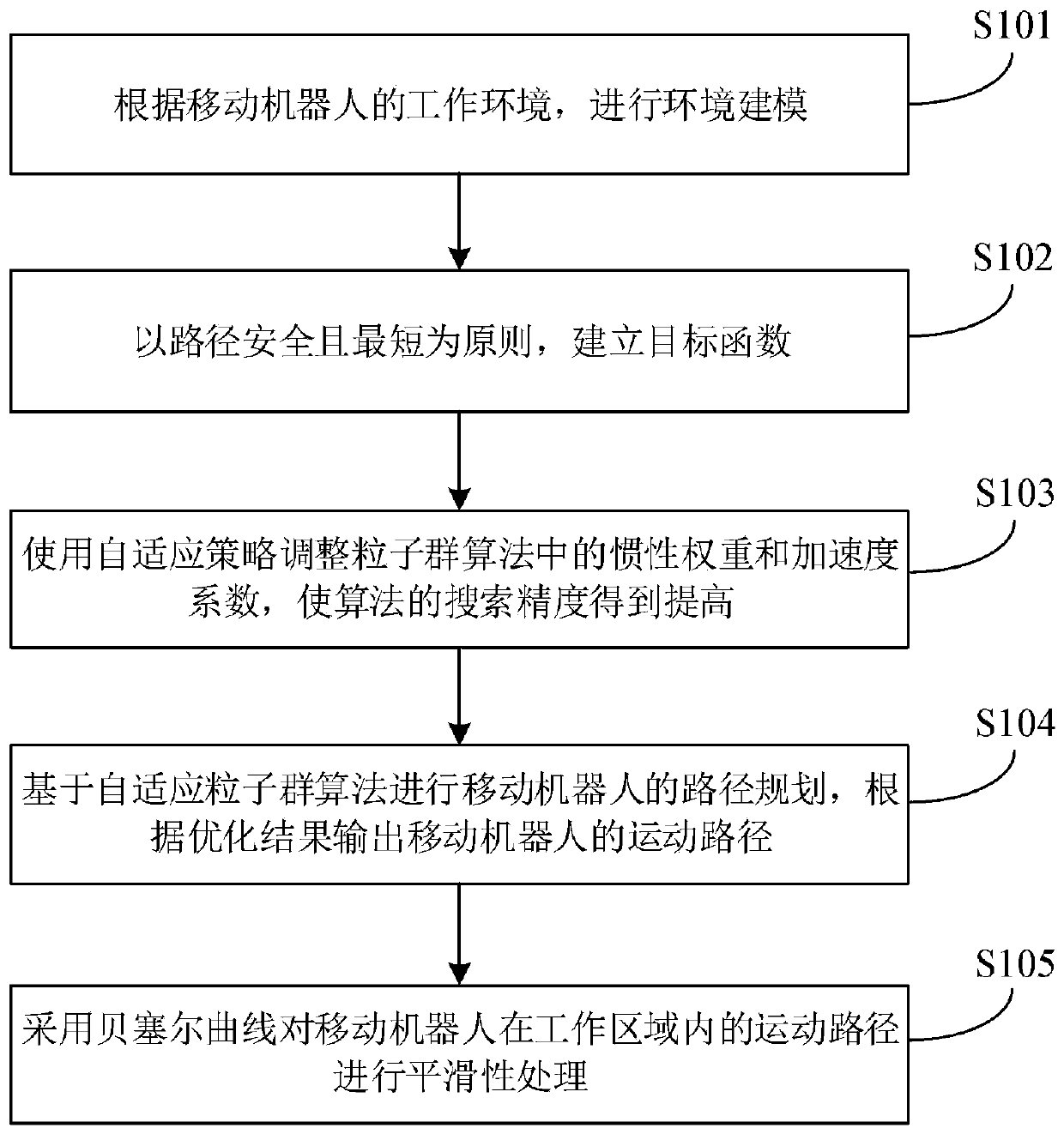
[0064] see figure 1 , the present invention discloses a global smooth path planning method for a mobile robot, which is based on an adaptively adjusted particle swarm algorithm (abbreviation: adaptive particle swarm algorithm or NAPSO), and combines the adaptive particle swarm algorithm with the Bezier curve Combined with planning the global smooth path of the mobile robot, it contains the following steps:
[0065] S101. Carry out a two-dimensional space simulation of the working environment of the mobile robot using the Cartesian coordinate system, regard the mobile robot as a point, and move in the working area, and use the visual system of the mobile robot to perceive its own position an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com