A mobile robot positioning and mapping method in dangerous chemical accidents
A technology for mobile robots and accidents, which is applied in the directions of instruments, surveying and navigation, navigation computing tools, etc., and can solve the problems of accumulative relocation errors, expensive laser radar SLAM, inability to locate and build maps, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. Note that the aspects described below in conjunction with the drawings and specific embodiments are only exemplary, and should not be construed as limiting the protection scope of the present invention.
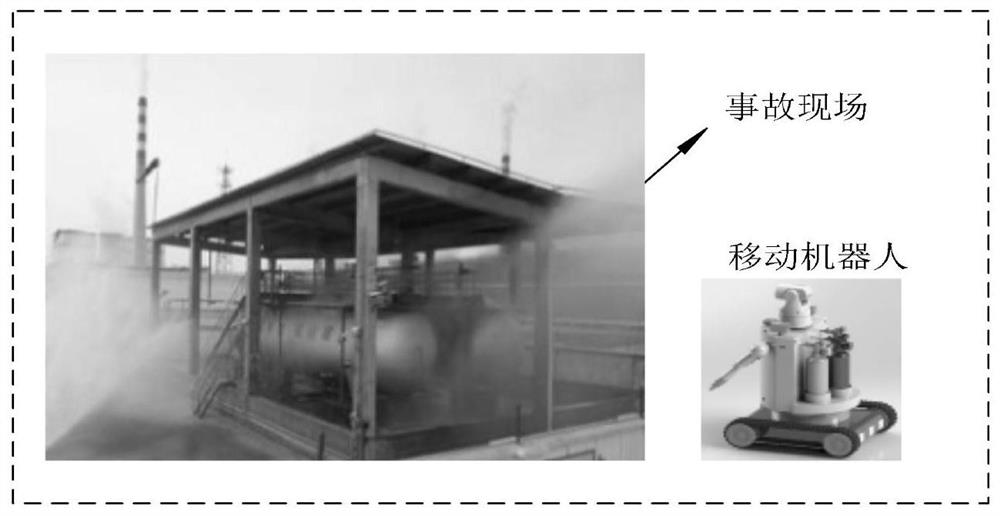
[0034] Step 1: For the smog phenomenon caused by hazardous chemical accidents, the smog will increase the brightness of the picture and reduce the saturation. A space-time based Markov random field algorithm is used for image defogging processing:
[0035] Based on the atmospheric light scattering model: I(x)=J(x)T(x)+A(1-T(x))
[0036] where I(x) is the observed image, J(x) is the real scene image, T(x) is the median transmittance, A is the global atmospheric light, and x is the pixel value. The dark channel map is obtained by using the dark channel prior algorithm, and the relationship between it and the transmittance is T(x)=1-wD(x) / A, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com