Unmanned ship unmanned aerial vehicle cooperative system and control method
A control method and technology for unmanned ships, applied in three-dimensional position/channel control, two-dimensional position/channel control, motor vehicles, etc. Program and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] In order to make the features and advantages of this patent more obvious and easy to understand, the following special examples are described in detail as follows:
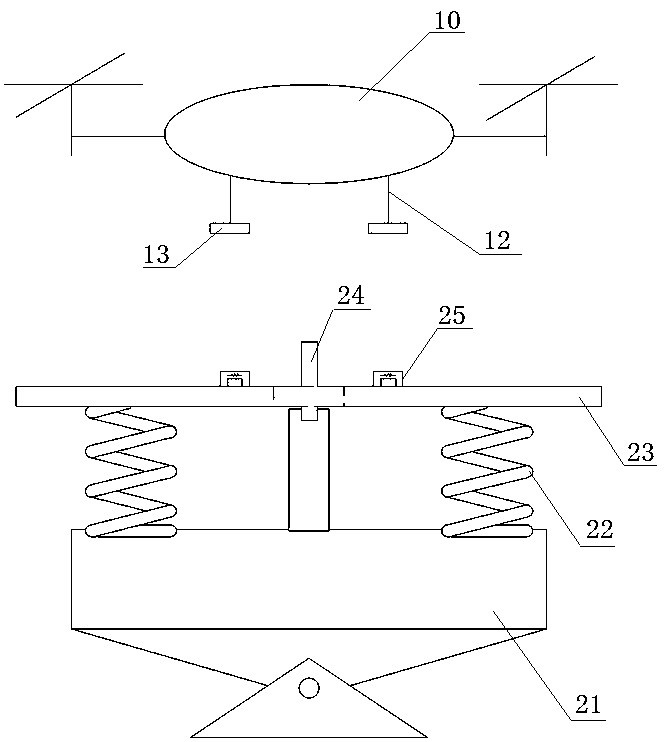
[0023] Such as figure 1 As shown, in the embodiment of the present invention, the overall system includes: multiple unmanned aerial vehicles, multiple unmanned ships and a control center, wherein the control center includes a sea control center and a shore-based control center. As the main control center, the shore-based control center is used to realize global scheduling, monitoring, data collection and collection, and undertake the same functions as the maritime control center in the near-shore area. In this embodiment, the maritime control center is generally set on the ship, and as the regional control center of the UAV and unmanned ship cluster, the maritime control center collects and masters the position coordinates of the UAV, the unmanned ship, and the location coordinates of the UAV. battery info...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com