Dynamic route planning method of multi-AGV based on intelligent parking lot
A dynamic path and path planning technology, applied in two-dimensional position/channel control and other directions, can solve the problems of large space and the path planning algorithm can not meet the requirements well, and achieve the effect of collision prevention, efficient and reliable algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
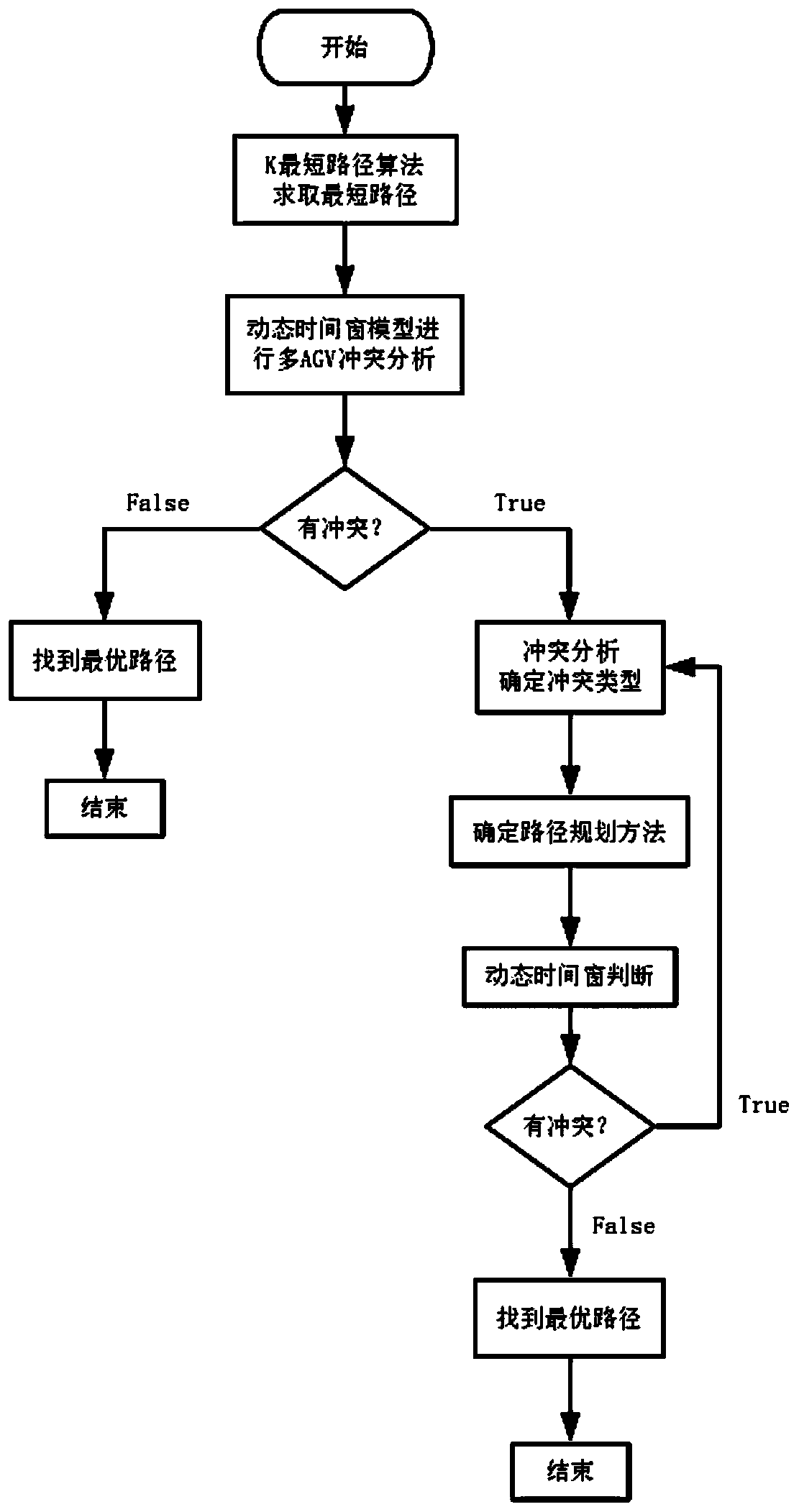
[0047] Such as figure 1 As shown, a kind of dynamic path planning method based on intelligent parking lot AGV described in the present invention, specifically comprises the following steps:
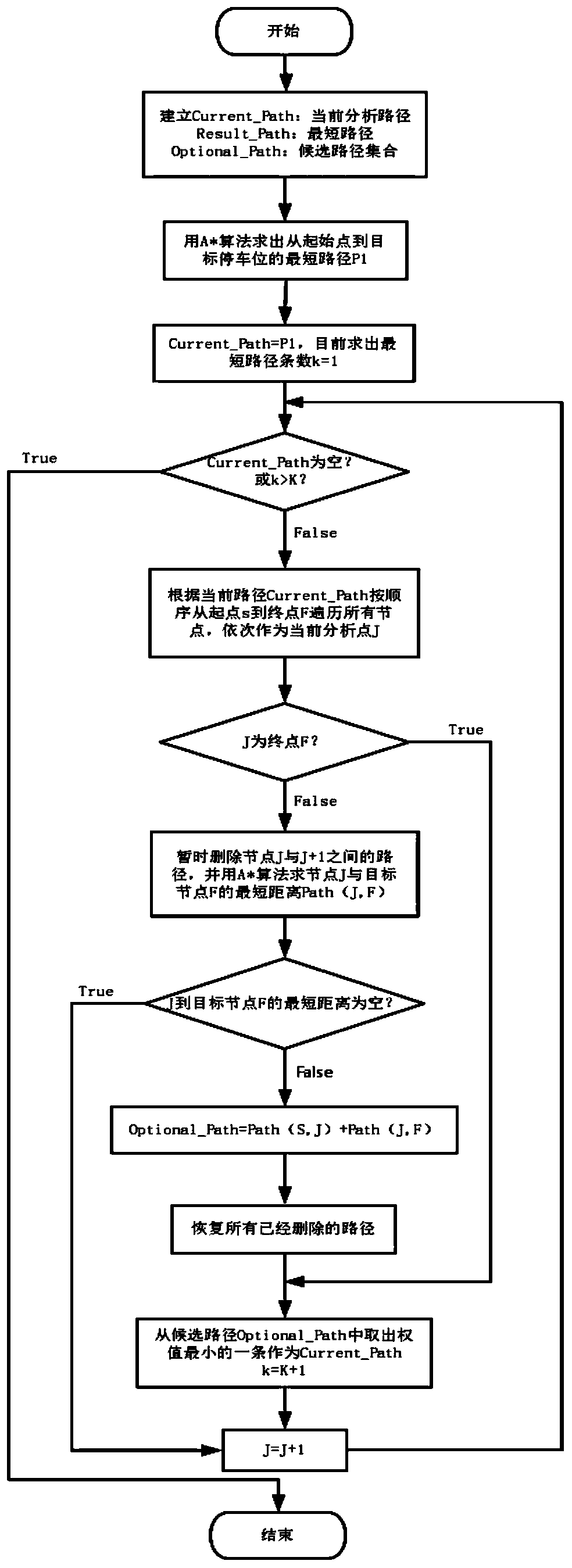
[0048] Step 1): Establish the K shortest path algorithm combining the A* algorithm and the Yen algorithm, and obtain the shortest path, second shortest path, ..., the Kth shortest path from the starting site to the target parking space as follows:
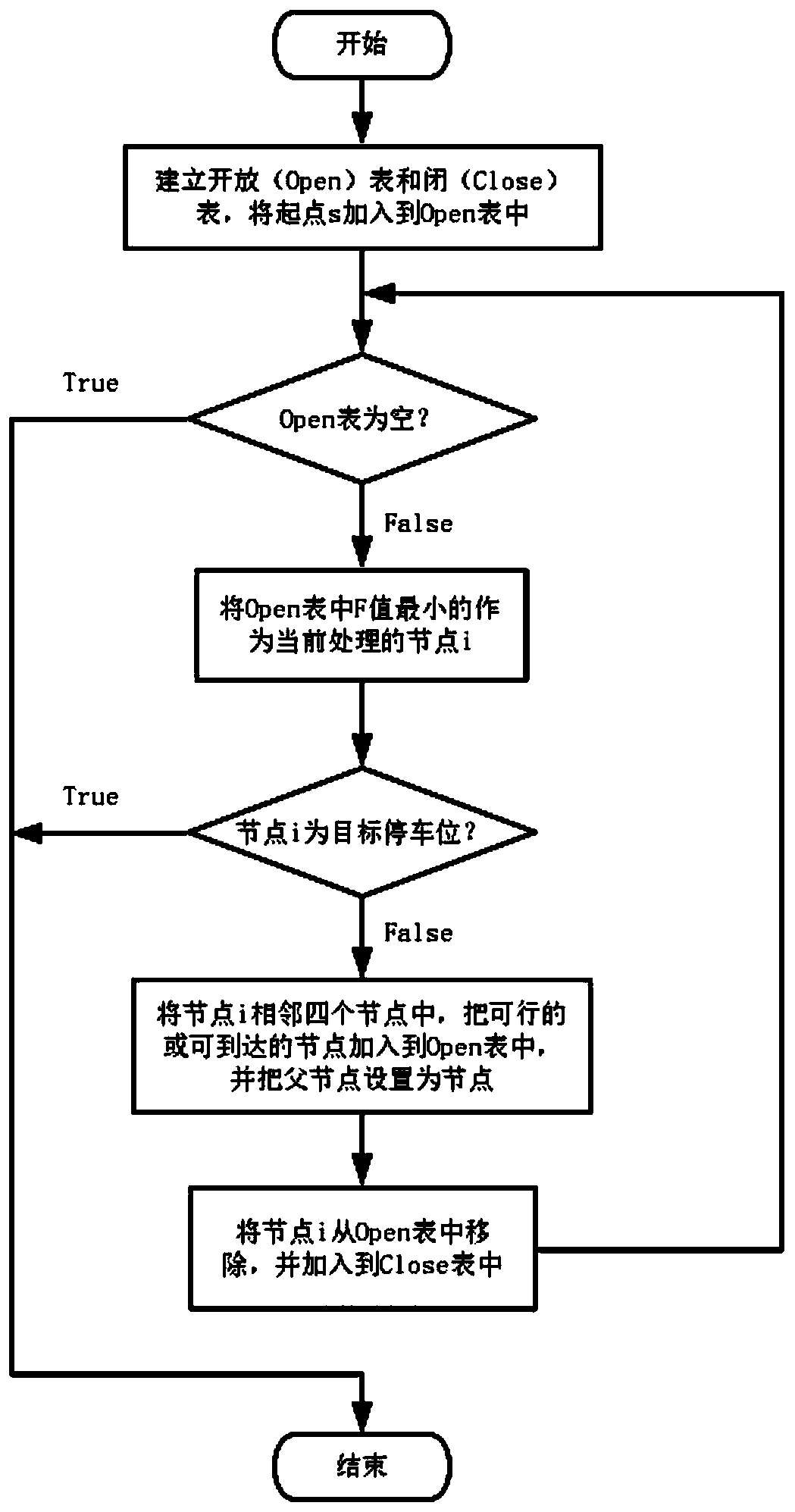
[0049] (1) A* algorithm: It is an efficient heuristic algorithm for solving the path between two points efficiently. Construct the objective function F(n) as follows:
[0050] F(n)=G(n)+H(n) (1)
[0051]Among them, n represents the nth node, G(n) represents the actual time from the starting point to node n, H(n) represents the estimated time from node n to the target node, and the movement of the path no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com