Visual calibration method and device and robot controller
A calibration method and robot technology, applied in the fields of instruments, image data processing, computing, etc., can solve the problems of lack of visual calibration at the end of the robotic arm, cumbersome visual calibration, etc., and achieve a more humanized effect of visual calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
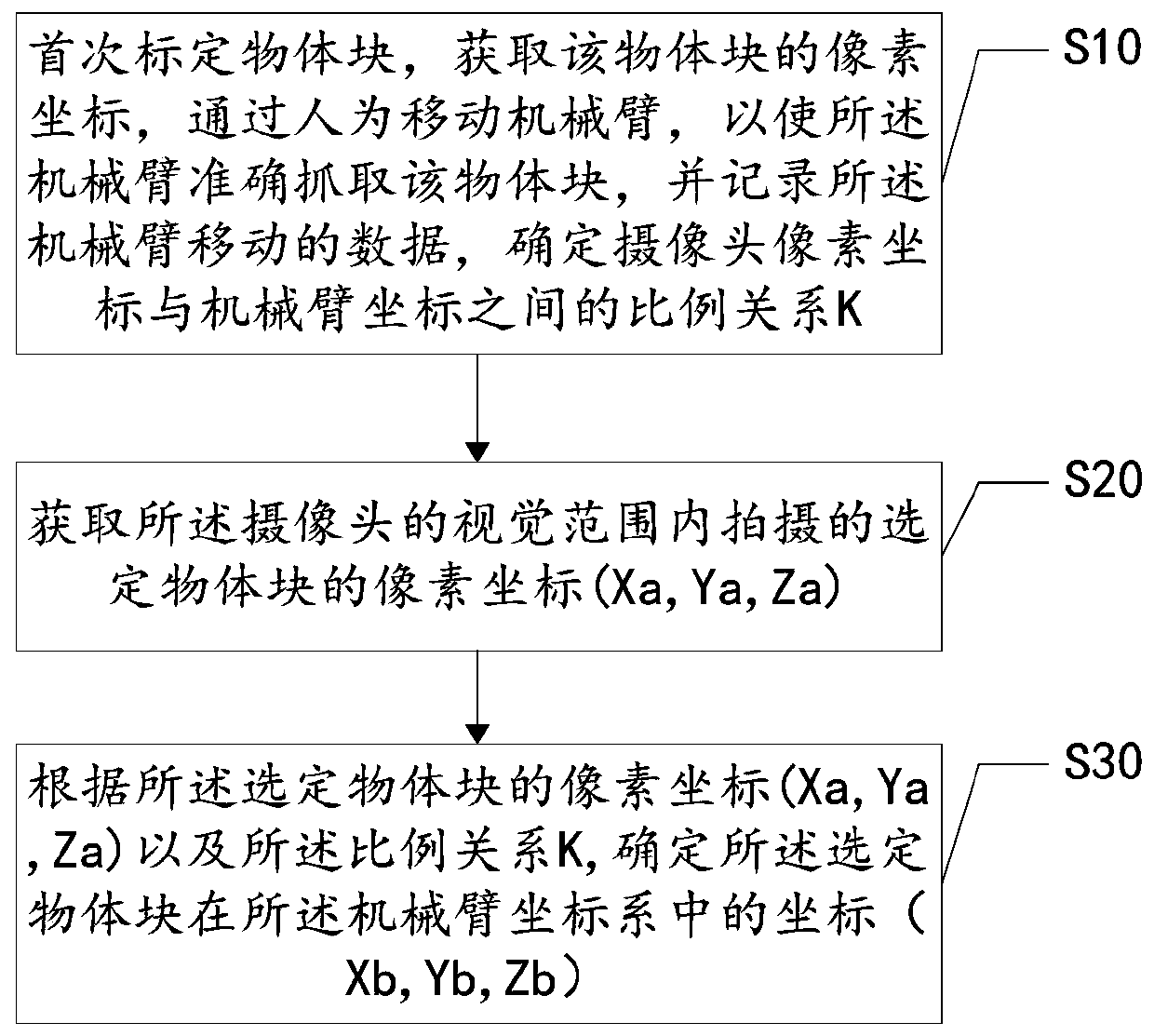
[0045] see figure 1 , figure 1 It is a schematic flowchart of a visual calibration method provided by an embodiment of the present invention;
[0046] Such as figure 1 As shown, the method is applied to a robot, such as a grabbing robot, wherein the robot is provided with a robot arm and a robot controller, the robot arm is connected to the robot controller, and the robot controller is used to control the robot arm Operation, the mechanical arm is used to grab or release objects, at least one camera is installed at the end of the mechanical arm, each of the cameras is connected to the robot controller, the camera can be a high-definition camera, and the camera For acquiring image information of objects within the visual range, and sending the image information to a robot controller, the method includes:
[0047] Step S10: calibrate the object block for the first time, obtain the pixel coordinates of the object block, manually move the mechanical arm so that the mechanical a...
Embodiment 2
[0061] see Figure 5 , Figure 5 A schematic structural diagram of a visual calibration device provided in an embodiment of the present invention, the visual calibration device can be applied to a robot, the robot includes a robot controller and a mechanical arm, and at least one camera is installed at the end of the mechanical arm, such as Figure 5 As shown, the visual marking device 100 includes:
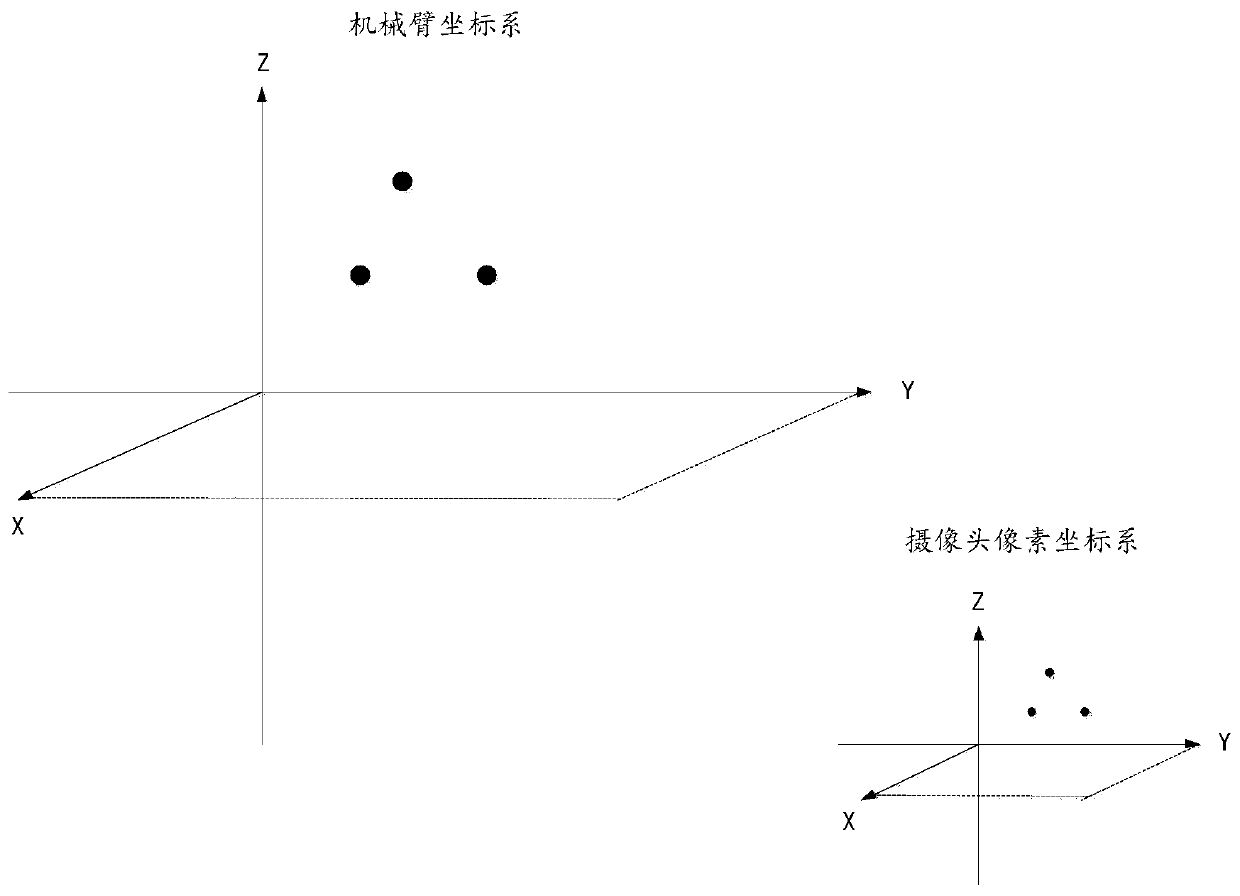
[0062] The proportional relationship unit 10 is used to calibrate the object block for the first time, obtain the pixel coordinates of the object block, manually move the mechanical arm so that the mechanical arm can accurately grasp the object block, and record the movement data of the mechanical arm to determine The proportional relationship K between the pixel coordinates of the camera and the coordinates of the manipulator;
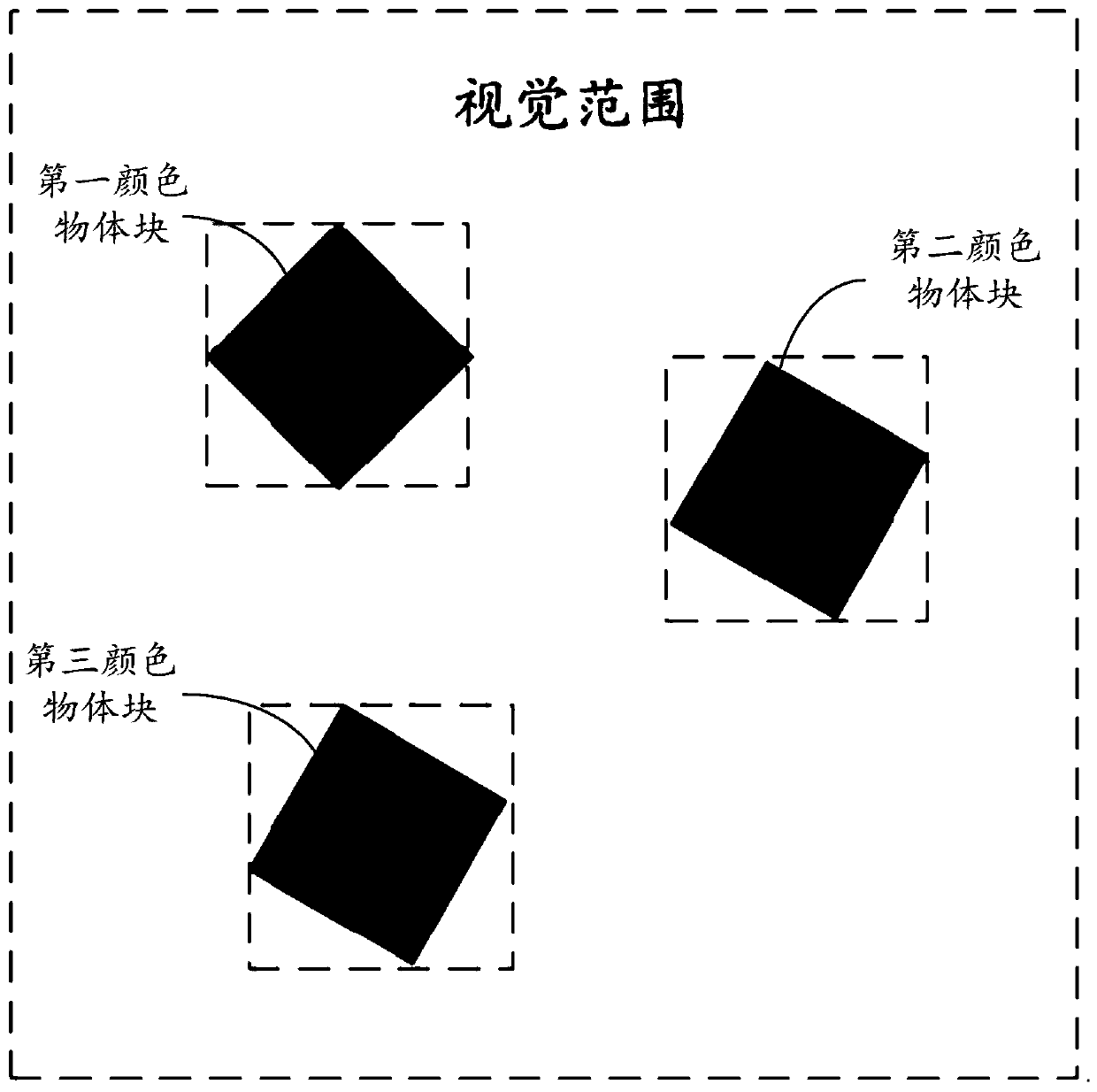
[0063] A pixel coordinate acquiring unit 20, configured to acquire pixel coordinates (Xa, Ya, Za) of a selected object block captured within the visua...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com