Robot simulation learning method based on dynamic system model
A dynamic system model, a technology for robotics, applied in the field of artificial intelligence and robot control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
[0064] A method of imitation learning for robots based on dynamic system models is used for robots to learn motor skills from human teaching. Through the way of teaching by hand, drag the end of the robotic arm to perform motion teaching, complete a motion task similar to picking and placing objects, and record the data of the teaching motion trajectory. Through the learning of the learning algorithm, the purpose of reproducing the teaching movement is achieved. The specific implementation is as follows:
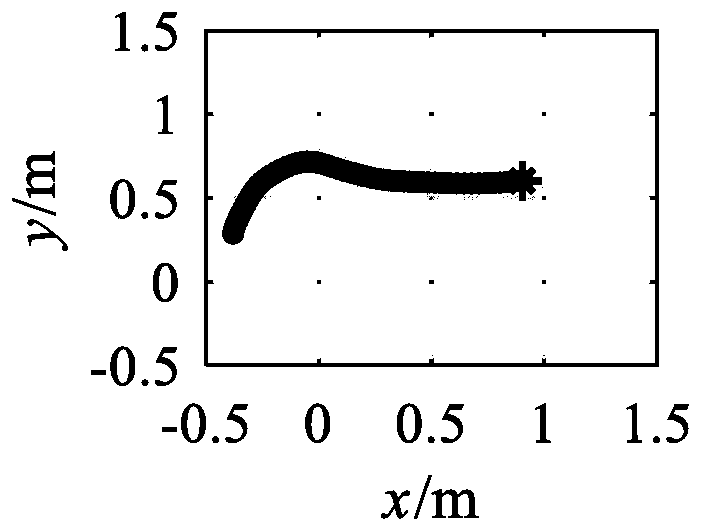
[0065] Step 1. Complete the required teaching movement by teaching by hand. The internal joint sensor of the mechanical arm records the change of each joint angle during the movement. By connecting the upper computer program of the mechanical arm, the positive movement of the mechanical arm Learn to solve the change of the position and velocity of the end effector, and record it as for subsequent motion modeling. As shown in Figure 2(a), it is a single simple teaching mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com