Mechanical arm tail end camera hand-eye calibration method and system
A technology of hand-eye calibration and robotic arm, which is applied in the directions of manipulators, program-controlled manipulators, image data processing, etc., which can solve the problems of space conversion relationship, difficult measurement, and unsolved hand-eye relationship calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0021] In order to make the technical solutions and advantages in the embodiments of the present application clearer, the exemplary embodiments of the present application will be further described in detail below in conjunction with the accompanying drawings. Apparently, the described embodiments are only part of the embodiments of the present application, and Not an exhaustive list of all embodiments. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
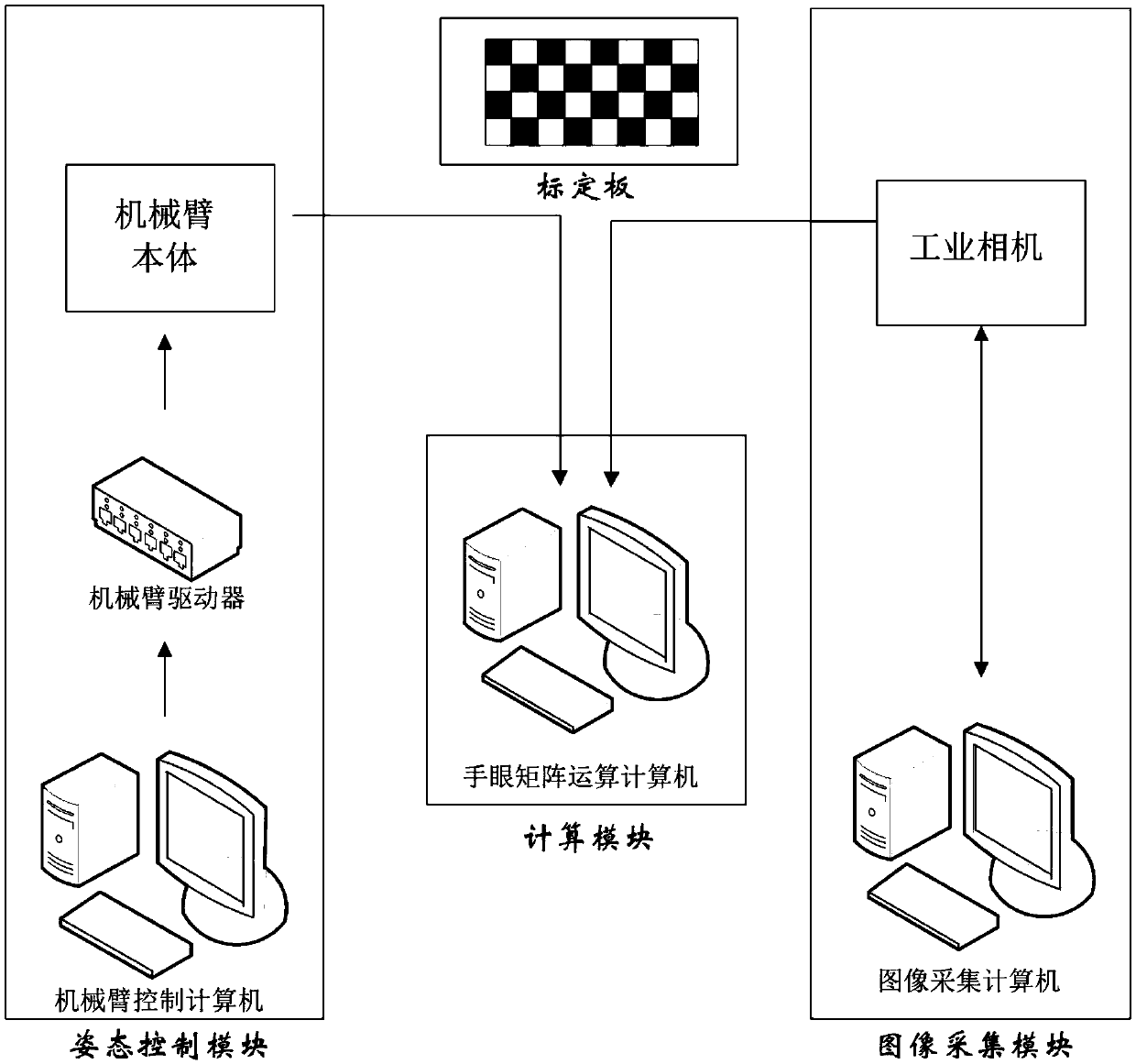
[0022] The core idea of this solution is to calibrate the camera using images in different positions of the robotic arm, and constrain the hand-eye relationship according to multiple spatial relative positions; further, in the process of solving the hand-eye matrix, the hand-eye matrix is divided into rotation and translation The two parts are solved separately, the rotation part is calculated first, and then t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com