Rule and learning model-based highway leaving method for driverless cars
An unmanned vehicle, a rule-based technology, applied in vehicle position/route/altitude control, two-dimensional position/navigation control, road vehicle traffic control system, etc. uncontrollable problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
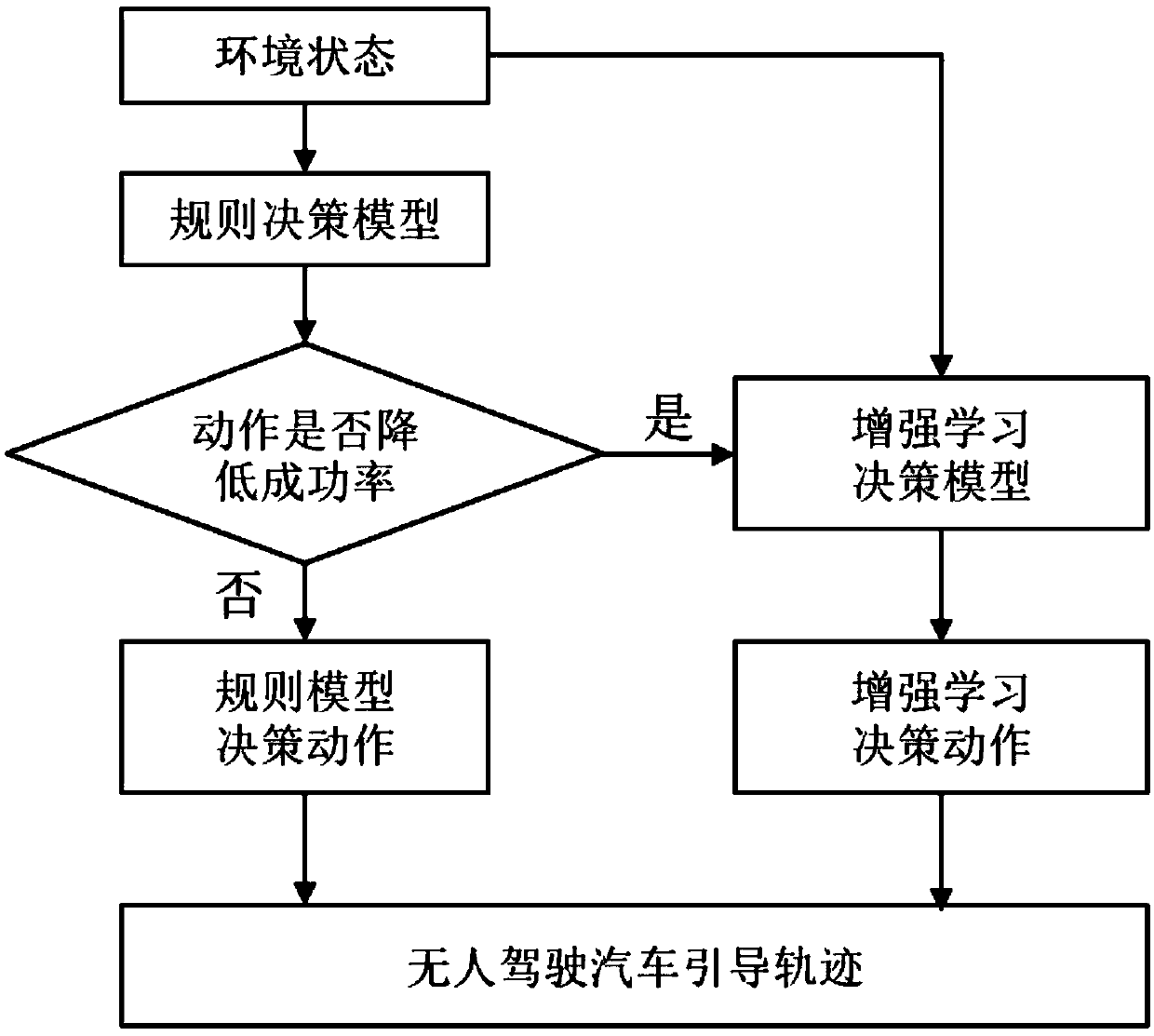
[0058] Such as figure 1 As shown, the present invention provides a method for unmanned vehicles based on fusion rules and learning models to drive away from high speed, which includes the following steps:
[0059] 1) When an unmanned car is driving on the highway, according to the navigation system generating the off-ramp motivation a certain distance before the ramp, first use the rule-based decision model (ie rule model) to try the off-ramp, and judge the rule-based decision Whether the ramp under the model reduces the success rate, if not, then adopt the rule model decision-making action, if it decreases, go to step 2);
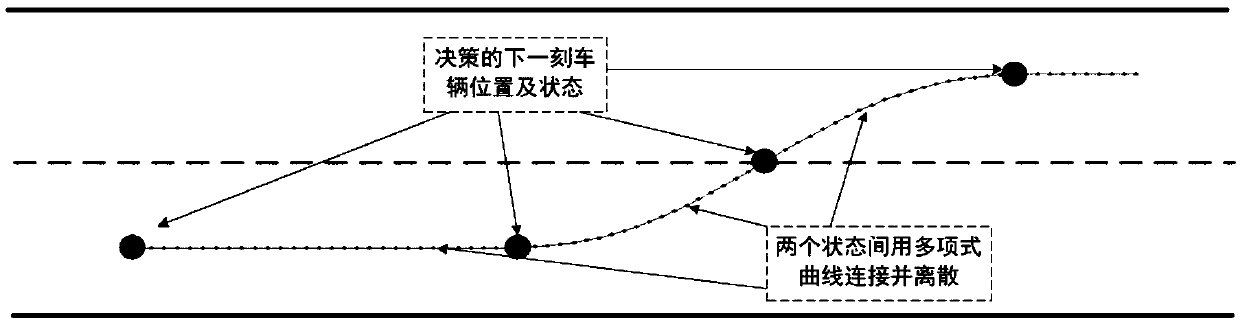
[0060] For the convenience of description, first take the starting point of the ramp as the origin, the direction of the vehicle is x, and the vertical direction of the vehicle is y, and the unit is m to establish a rectangular c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com