Unmanned ship position and speed estimation structure containing measurement noise and design method
A technology of unmanned ships and accelerometers, applied in navigation through speed/acceleration measurement, navigation calculation tools, etc., can solve problems such as large amount of calculation, difficult implementation of ordinary single-chip microcomputer, difficulty in parameter adjustment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
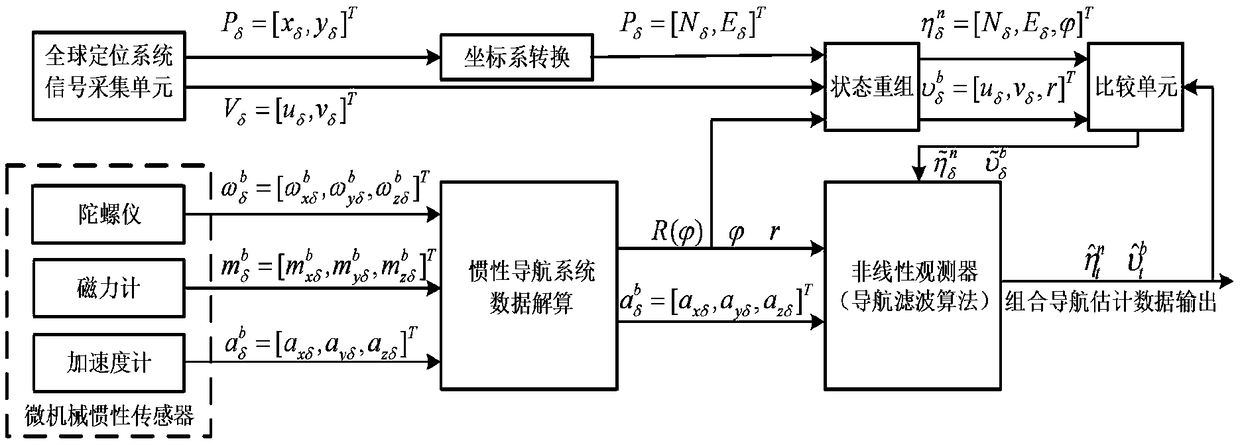
[0067] In the following, a specific underactuated unmanned ship is used to observe the position and speed state information, and take this as an example to further illustrate the specific implementation of the present invention. figure 1 It is a structural schematic diagram of the present invention, wherein the unmanned ship model is simplified and reorganized as follows:
[0068]
[0069] in:
[0070]
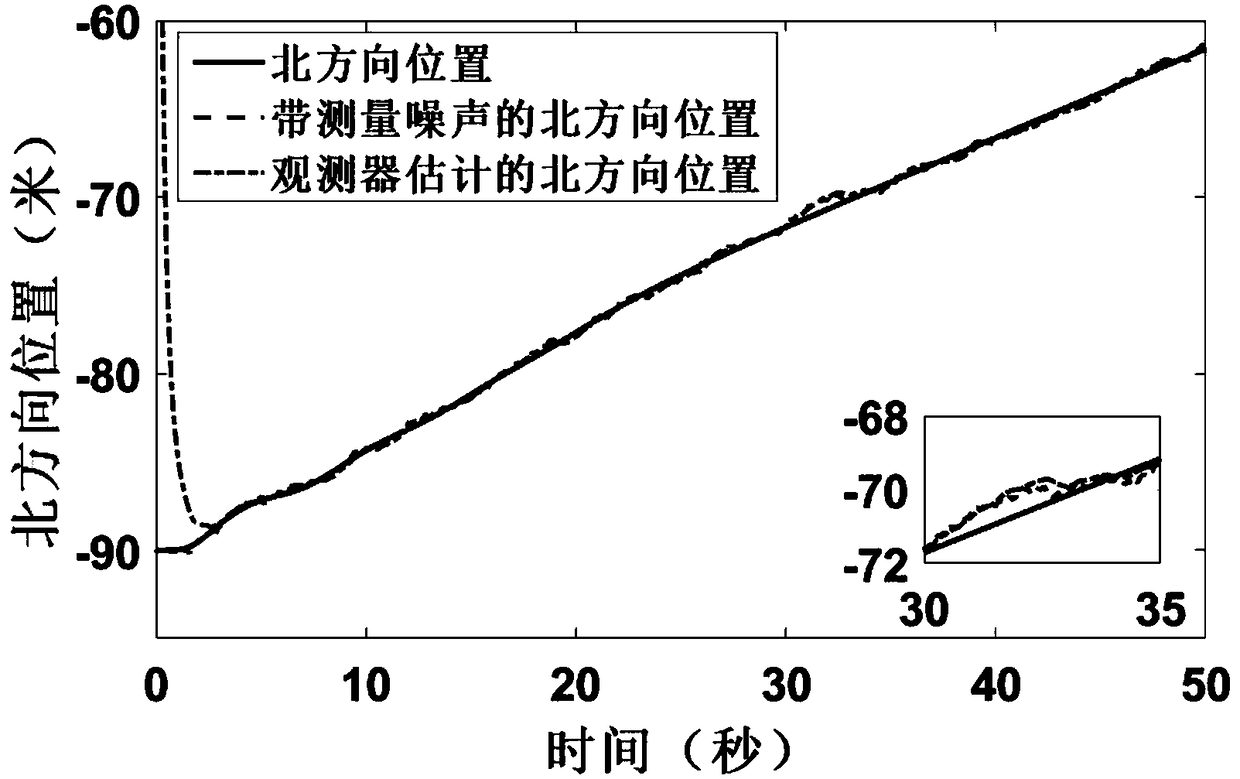
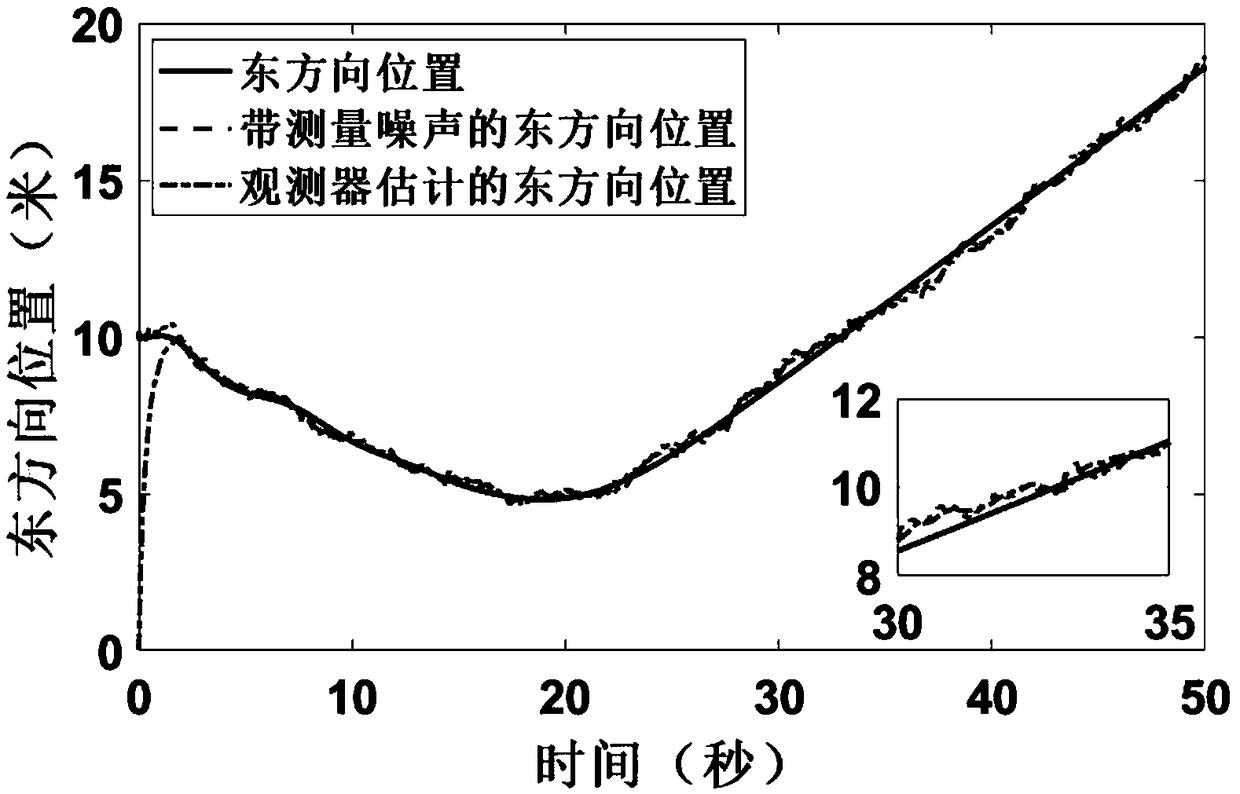
[0071] Let the unmanned ship move in a straight line under the control torque, and the speed of the unmanned ship is m per second, the initial position of the unmanned ship is set to the position of -90 meters north of the selected origin and 10 meters east of the origin, that is, the position of 90 meters south of the origin and 10 meters east of the origin, estimated by a nonlinear observer The structure of the position and velocity state information system of the unmanned ship satisfies formulas (4)-(7), and the gain parameters of the designed nonlinear observer ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com