A control method and system for solving the problem of overturning during unmanned ship navigation
A control method and control system technology, applied in the direction of unmanned surface ships, ship safety, special-purpose ships, etc., can solve the problems that unmanned ships cannot continue to work, the operating environment is harsh, and data cannot be recovered, and achieve good secondary The effect of righting ability, convenient salvage and recovery, and reduced navigation risk
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
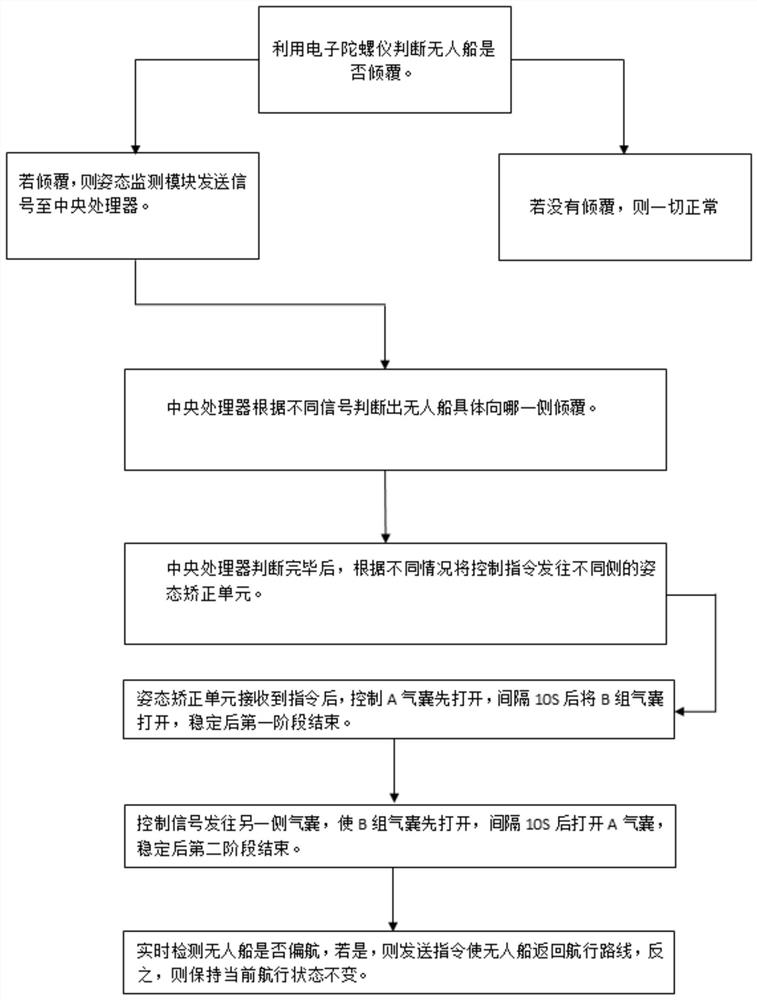
[0039] The present invention provides a control method for solving the problem of overturning in unmanned ship navigation, such as figure 1 As shown, it includes the following steps:
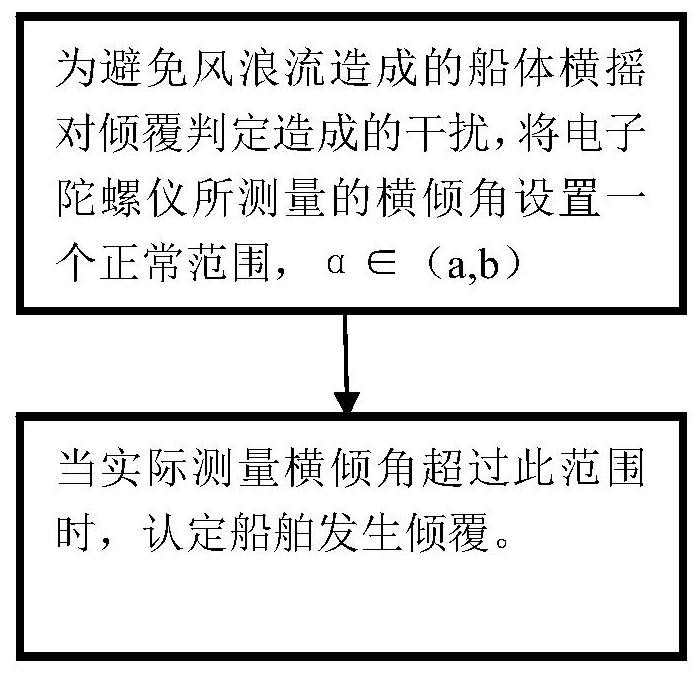
[0040] S1. Determine whether the unmanned ship has capsized, such as figure 2 As shown, specifically, the heel angle can be collected by the gyroscope that comes with the hull, and the normal range of the heel angle α∈(a,b) can be set. When the collected heel angle exceeds the normal range, it is judged that the unmanned ship has capsized.
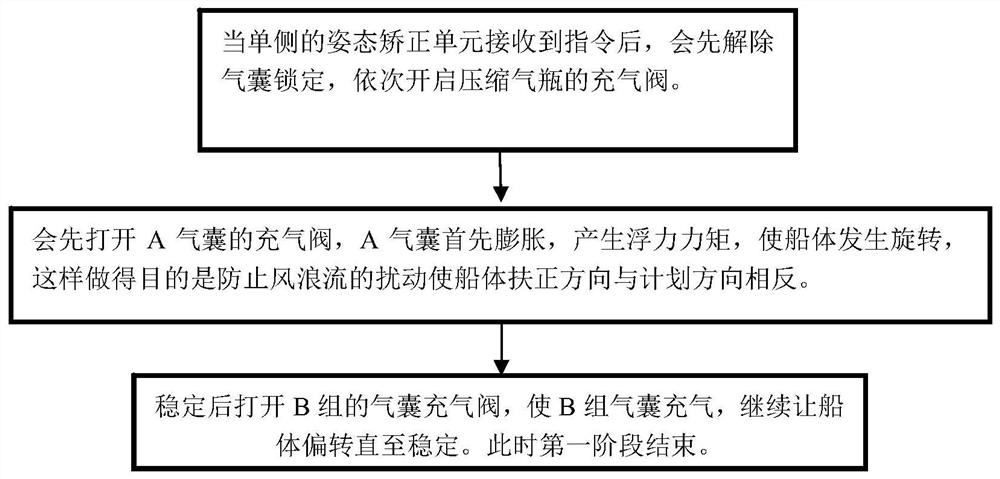
[0041] S2. When it is judged that the unmanned ship has capsized, a corresponding attitude correction signal is sent according to the direction of the capsizing. Specifically, it can be judged whether it is leaning left or right according to the collected heel angle. flat.
[0042] S3. Send control instructions to the correspond...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com