Distributed multi-target tracking method for swarm robots on the basis of PHD (Probability Hypothesis Density) filtering
A multi-target tracking and swarm robot technology, which is applied in the field of distributed multi-target tracking of swarm robots, can solve the problems of not proposing a robot multi-target tracking dynamic model, and not considering the global path planning problem of group robot coordination control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
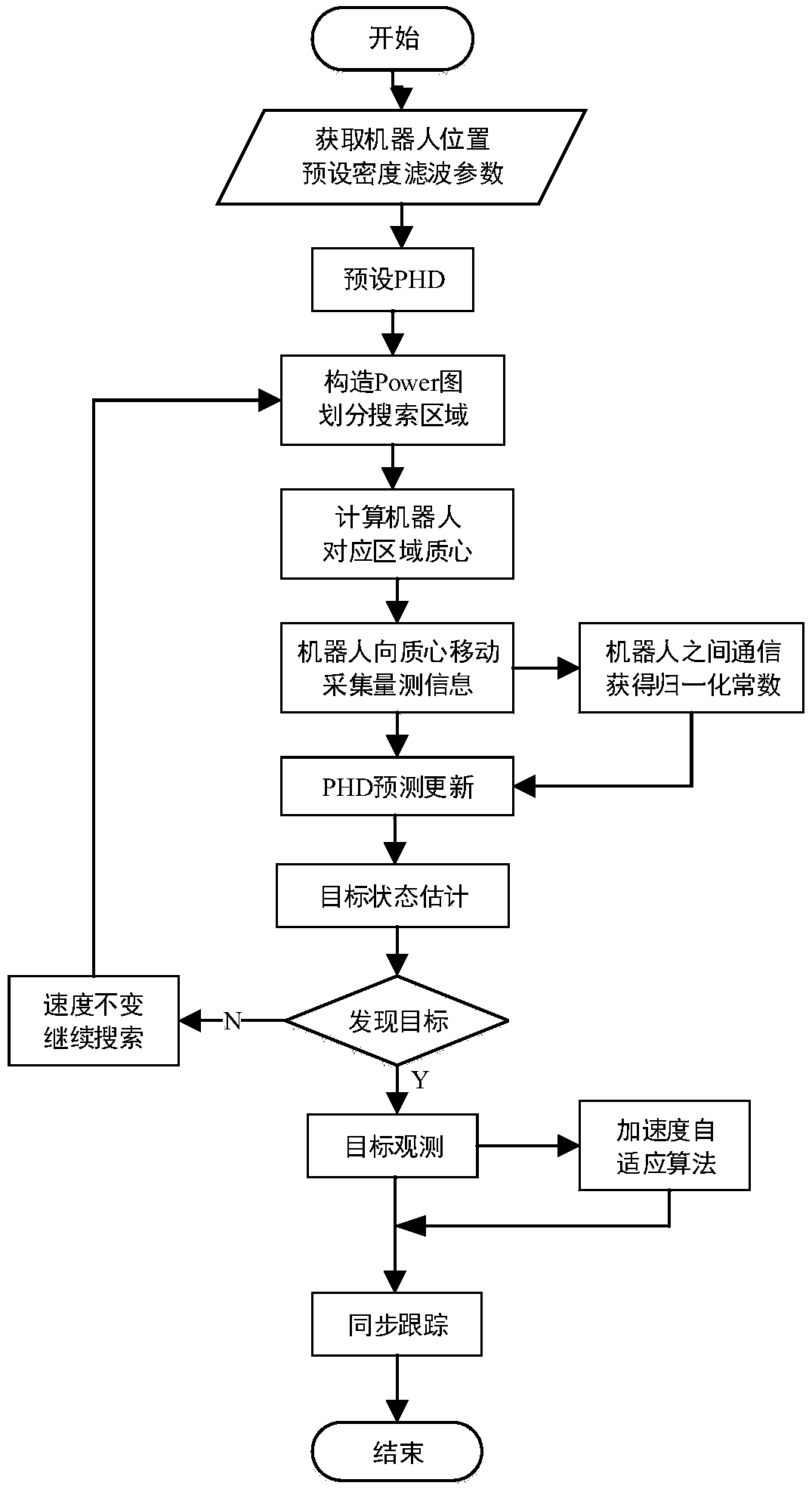
[0070] A method for multi-target search and tracking of swarm robots based on PHD filtering, comprising the following steps:
[0071] In the first step, assuming that in the initial state, the swarm robots are randomly distributed within a given square constraint boundary, and according to the position coordinates and weights of the multi-robots, a Power graph is constructed to divide the search area.
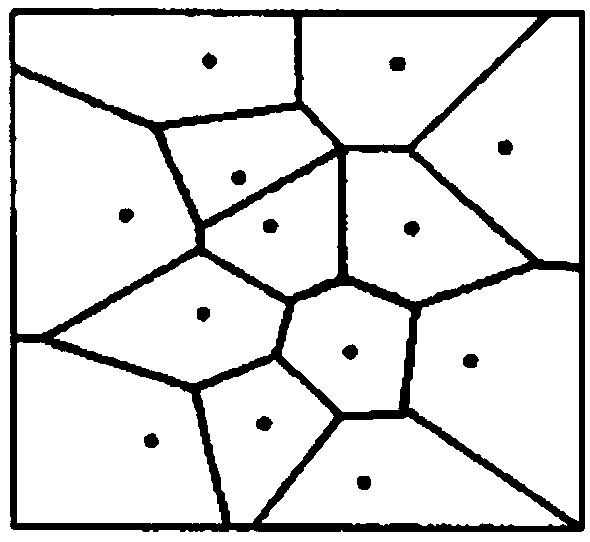
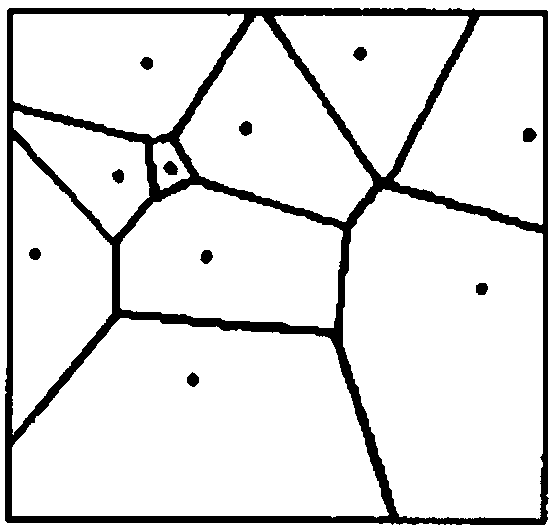
[0072] The Power diagram is a weighted Voronoi diagram, as attached figure 2 , the Voronoi diagram divides the space according to the position of the discrete points, so that the distance between the points in each Voronoi area and the corresponding discrete points is the smallest, and the Power diagram assigns weight to each discrete point, redefining the concept of distance in the Voronoi diagram, optimizing The traditional Voronoi diagr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com