Hand-eye calibration and coordinate conversion method
A technology of coordinate transformation and hand-eye calibration, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increasing calibration errors, limited shooting range, and concentrated distribution of collected data samples, so as to reduce calibration errors and simplify hand-eye The effect of the calibration process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
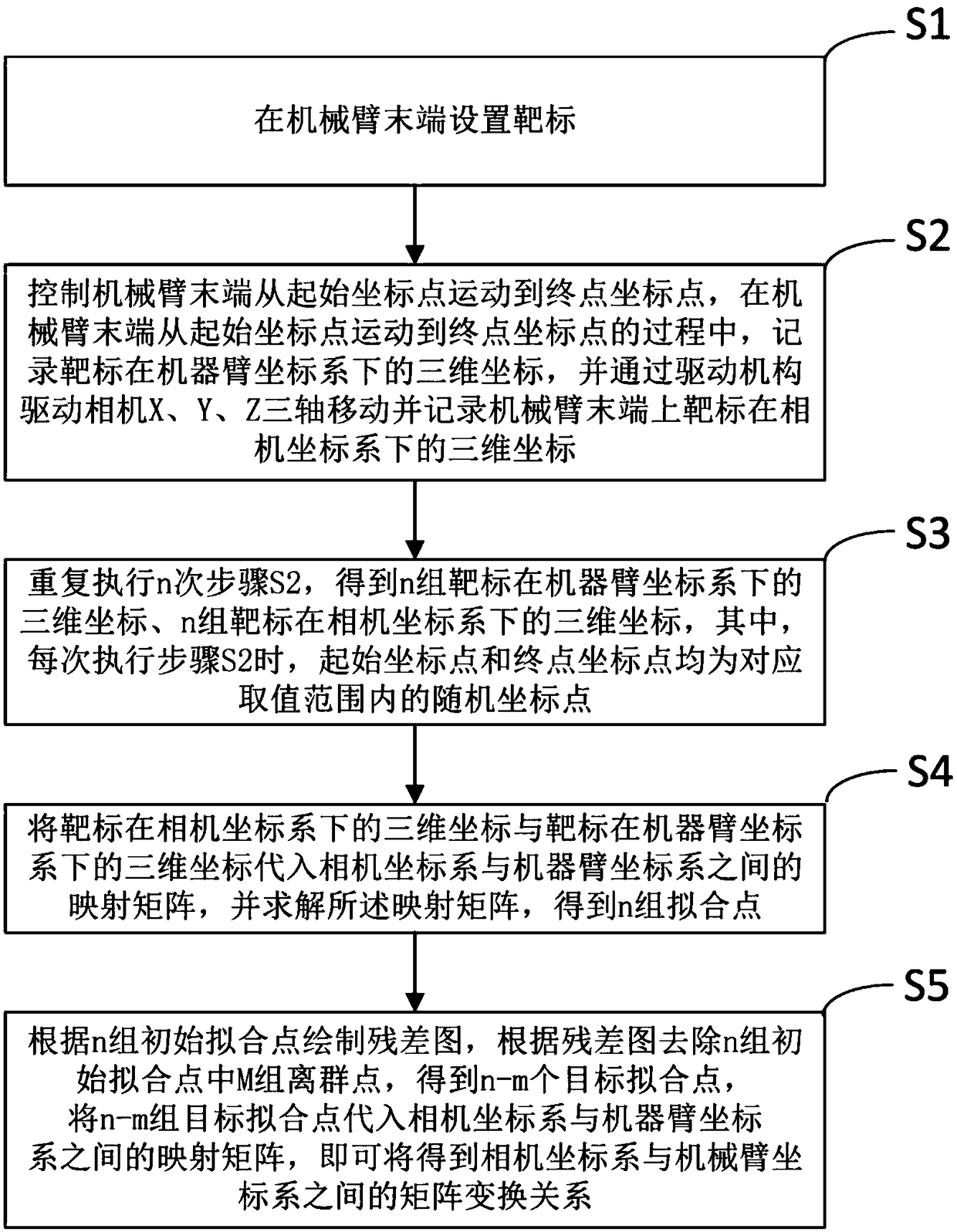
[0022] refer to figure 1 , a kind of hand-eye calibration and coordinate transformation method that the present invention proposes, comprises:
[0023] Step S1, setting a target at the end of the robotic arm, the robotic arm being a six-degree-of-freedom robotic arm.
[0024] In the specific scheme, the target is pasted on the end of the mechanical arm. The mechanical arm adopts a six-degree-of-freedom mechanical arm. Each degree of freedom of the mechanical arm is realized by the independent drive joints of its manipulator. The joints and degrees of freedom express mechanical The mobility aspects of the arms are synonymous. The six-degree-of-freedom robotic arm has six independently driven joint structures, which can realize any position and posture of the target in its workspace.
[0025] Step S2, control the movement of the end of the mechanical arm from the initial coordinate point to the end coordinate point, record the three-dimensional coordinates of the target in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com