Wheel steering following control system
A wheel and follow-up technology, applied in the field of wheel steering follow-up control system, can solve the problem of unable to complete the steering function normally, and achieve the effect of reducing lateral force and maintaining relative stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
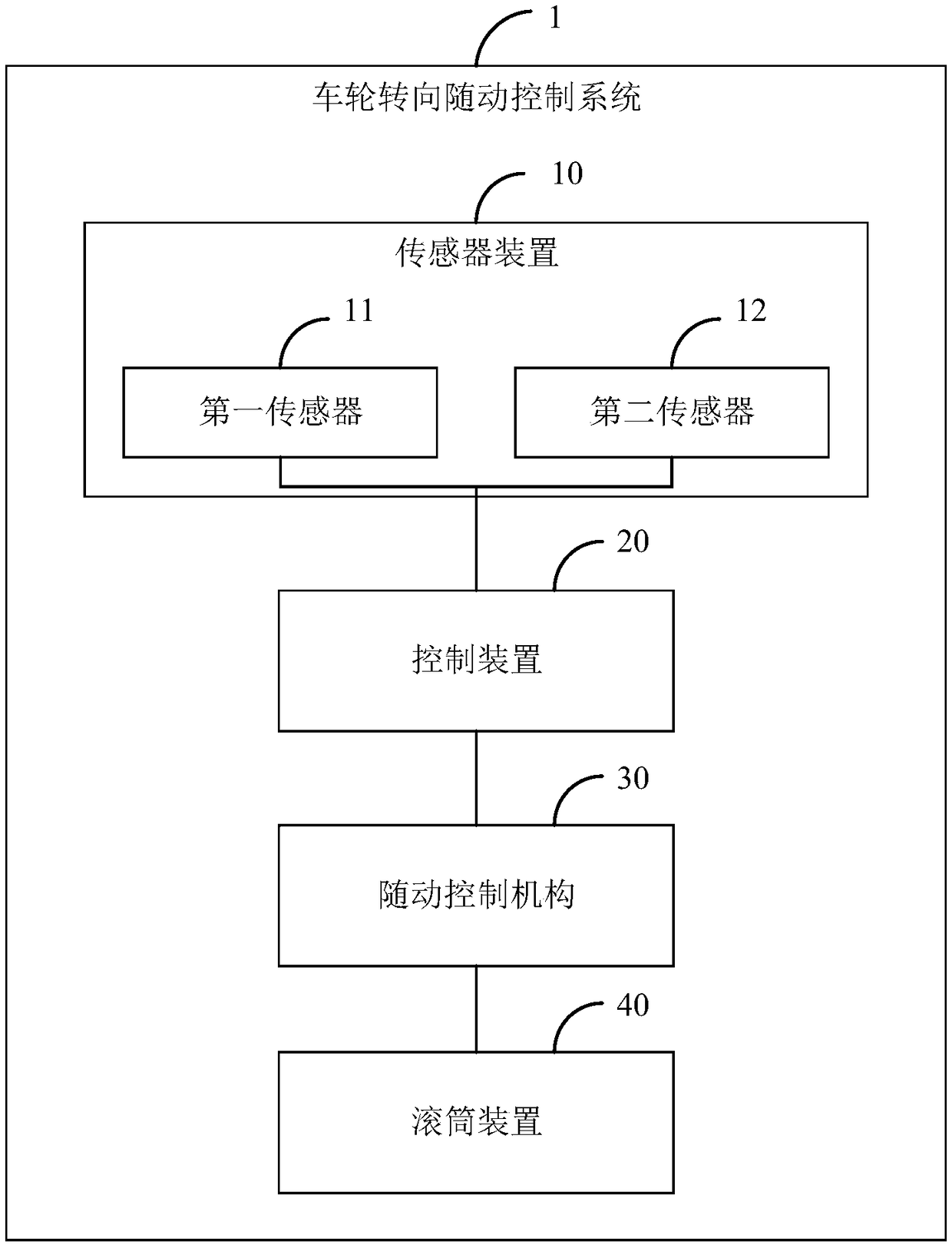
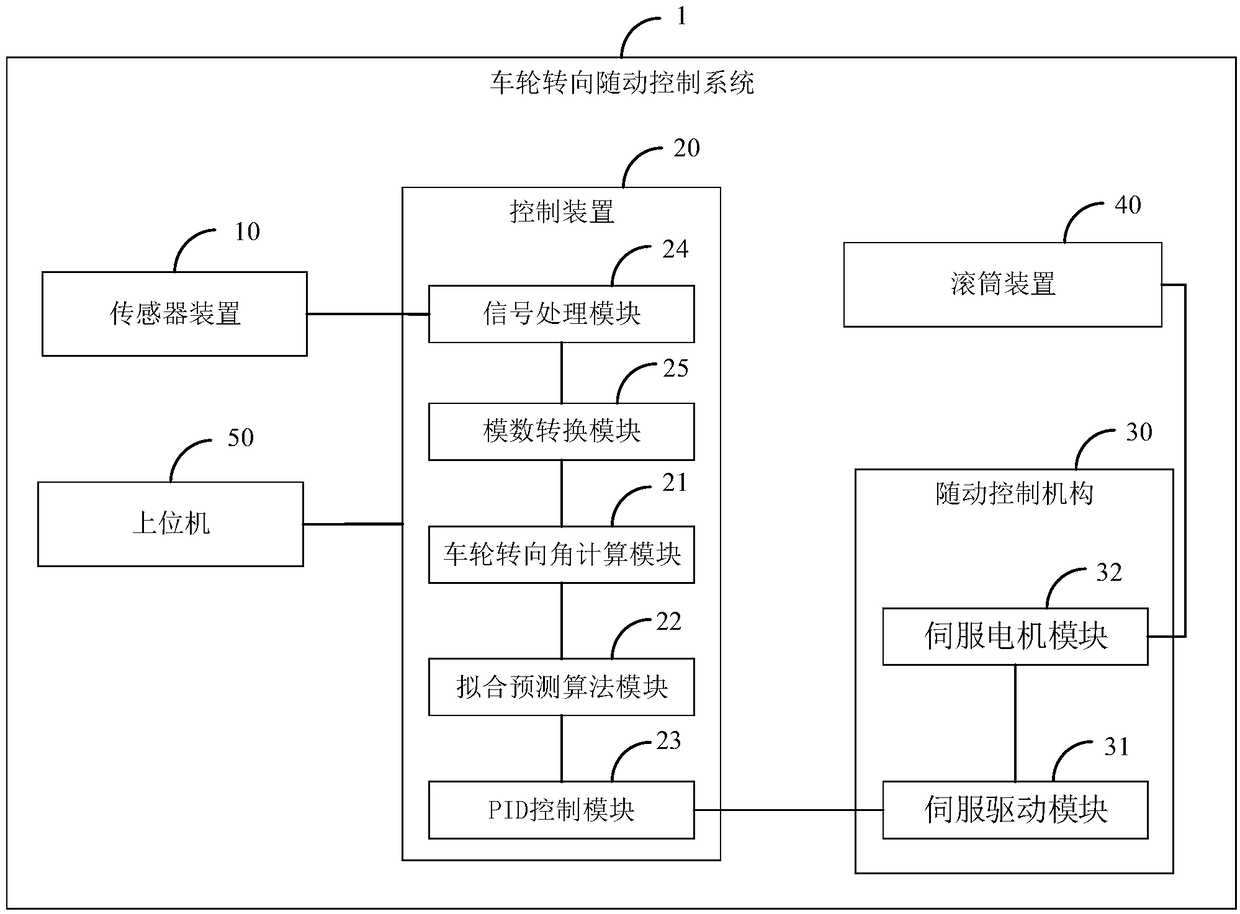
[0030] figure 1 A schematic structural diagram of a wheel steering follow-up control system 1 provided by an embodiment of the present invention is shown, which includes a sensor device 10 , a control device 20 , a follow-up actuator 30 and a roller device 40 .
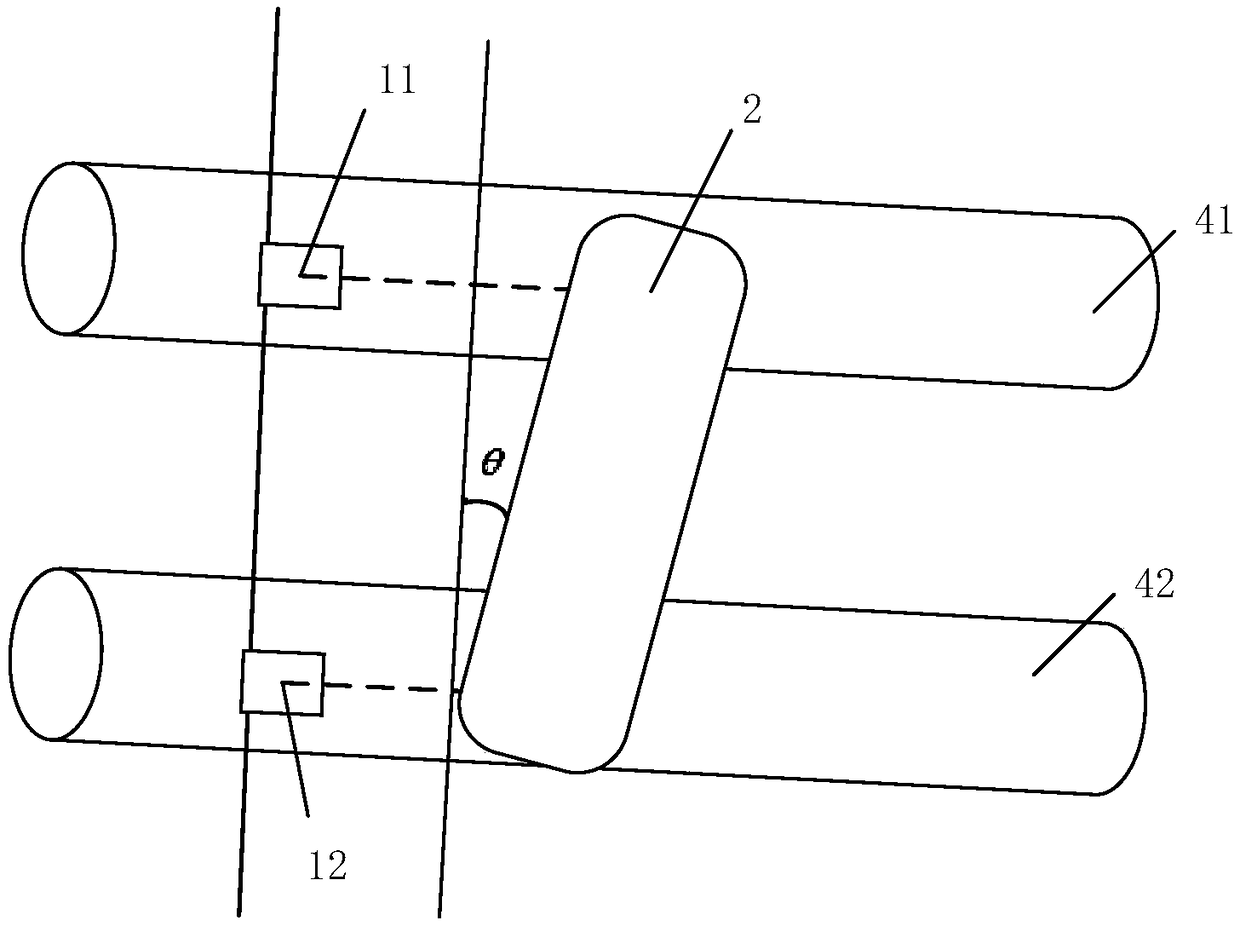
[0031] The sensor device 10 is connected with the control device 20, the control device 20 is connected with the follow-up actuator 30, the follow-up actuator 30 is mechanically connected with the roller device 40, and the roller device 40 is used to support the wheel; the sensor device 10 includes a first sensor 11 and a second Two sensors 12, the first sensor 11 is used to detect the first distance from itself to the wheel, and sends the first distance to the control device 20, and the second sensor 12 is used to detect the second distance from itself to the wheel, and sends the second distance sent to the controller 20.
[0032] The control device 20 calculates the roller control amount according to the first dist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com