


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A vehicle formation autonomous following control system and method
A vehicle and formation technology, applied in the control/regulation system, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problem of the high error rate of following vehicles and the inability to resume following, so as to reduce the following problems. The effect of car error rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
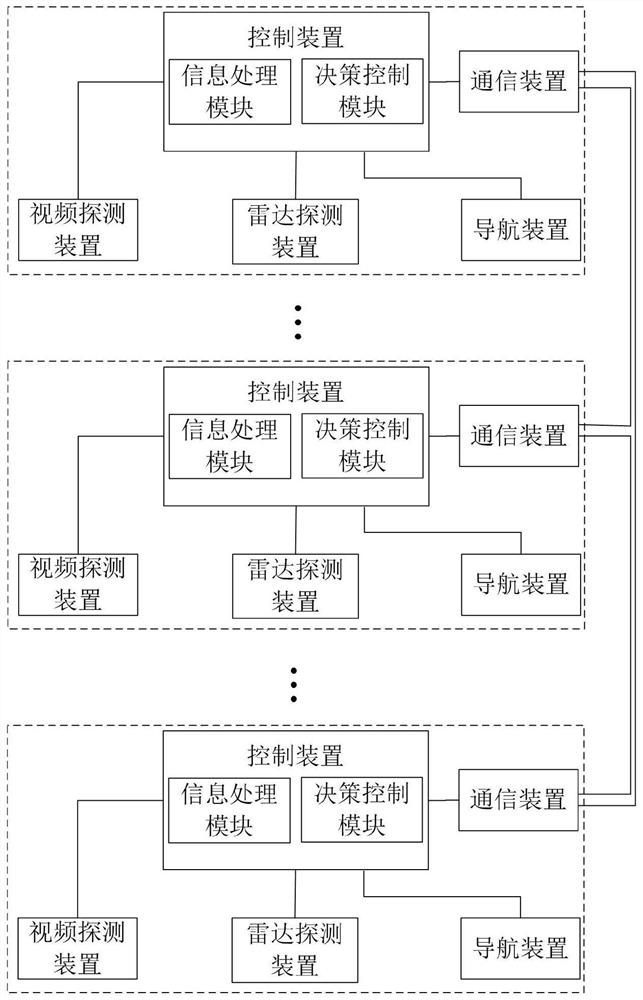
[0042] A specific embodiment of the present invention discloses a vehicle formation autonomous following control system, its structural schematic diagram is as follows figure 1 shown.
[0043] The vehicle formation autonomous following control system includes a control device, a communication device, a video detection device, a radar detection device, and a navigation device, and the communication device, the video detection device, the radar detection device, the navigation device, and the vehicle chassis pass through The communication cable is connected, and the communication device is connected with other vehicle communication devices through wireless communication (including but not limited to: 2G, 3G, 4G, 5G, radio).
[0044] If in the vehicle formation, the leading vehicle is a manned vehicle and the following vehicle is an unmanned vehicle, the leading vehicle needs to be equipped with a control device, a communication device and a navigation device, and the following v...
Embodiment 2
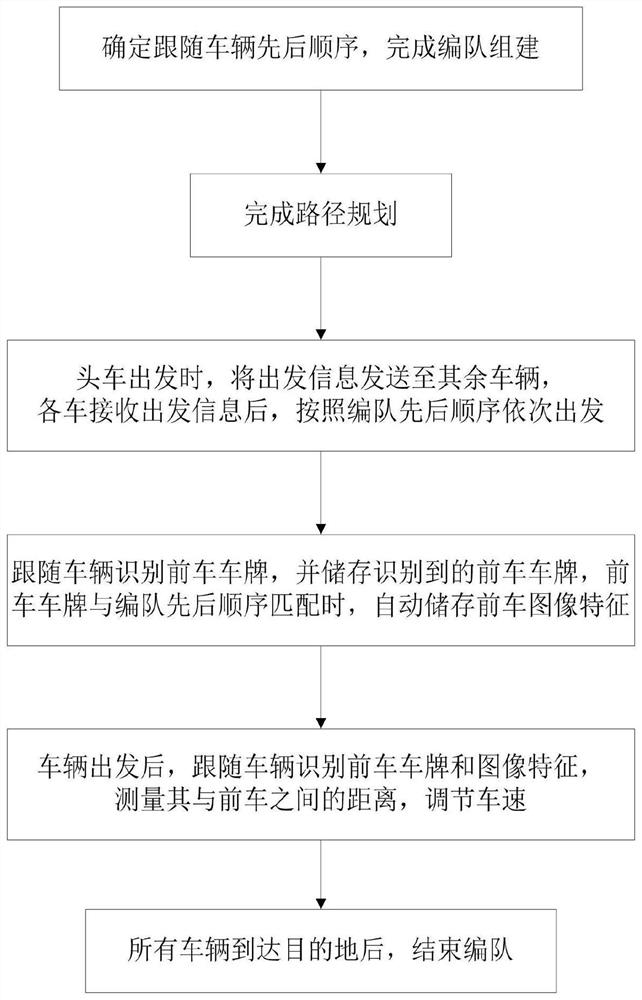
[0056] Another specific embodiment of the present invention discloses a vehicle formation autonomous following control method, which specifically includes the following steps:
[0057] Step S1, use the leading vehicle control device to input all vehicle numbers (including license plate numbers), determine the sequence of following vehicles, and complete formation formation;
[0058] Step S2: Use the control device of the leading car to input the destination, and the decision-making control module of the control device automatically completes the path planning; the leading car uses the video detection device to detect the video of the surrounding environment of the vehicle during driving, and the control device updates the path planning in real time according to the environmental information. The path planning specifically includes establishing an environment model using a modeling method such as a grid method, and then using an algorithm such as Dijkstra to search for a path to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com