An intelligent stairway cleaning robot with grasping and guardrail climbing ability and a control method thereof
A cleaning robot and control method technology, applied in the direction of cleaning carpets, cleaning floors, cleaning machinery, etc., can solve the problem of not being able to go up and down stairs and cleaning independently.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0097] In order to further illustrate the technical solution of the present invention and the beneficial effects brought by it, in conjunction with the accompanying drawings, the specific implementation of the present invention is as follows:
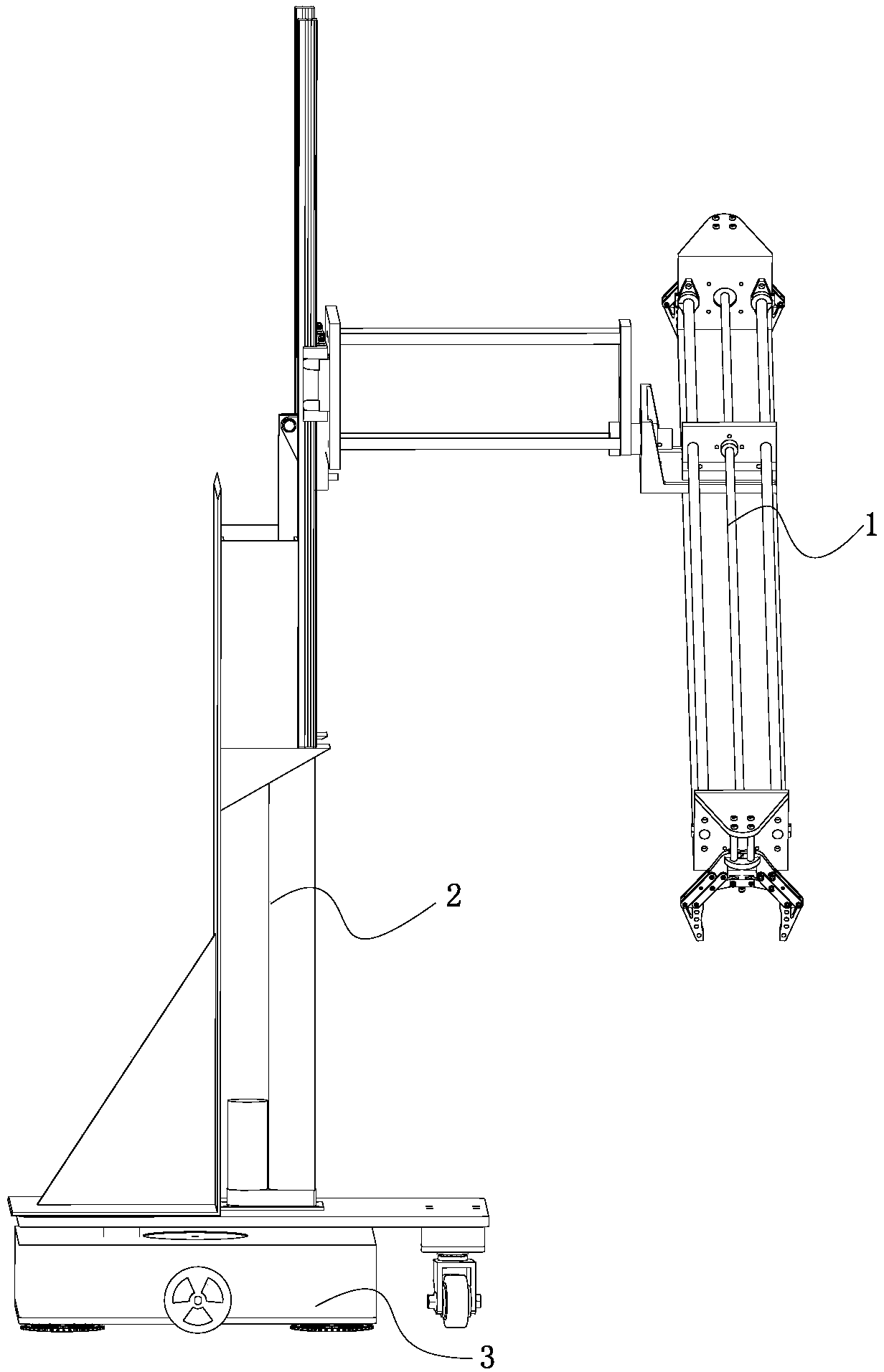
[0098] Such as figure 1 As shown, the present invention provides an intelligent stair cleaning robot with the ability to crawl on the guardrail. The intelligent stair cleaning robot is composed of three parts: the crawling mechanism 1, the lifting device 2 and the cleaning device 3, wherein the lifting device 2 The top is connected to the side of the guardrail crawling mechanism 1 by bolts, and the bottom of the lifting device 2 is fixedly connected to the top of the cleaning device 3 .
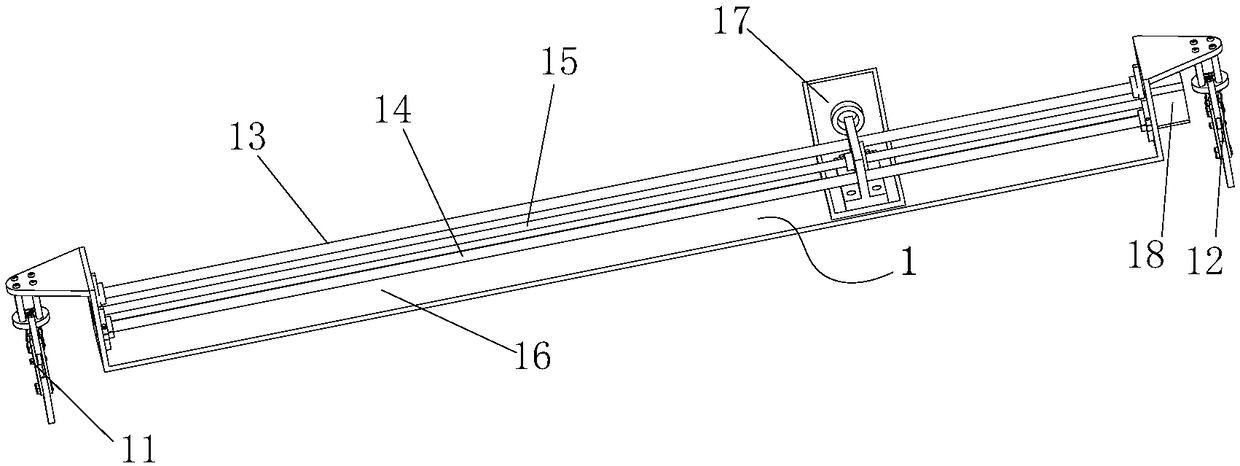
[0099] Such as figure 2 As shown, the crawling mechanism 1 for grabbing guardrail is composed of clamping mechanism A 11, clamping mechanism B 12, guide rod A 13, guide rod B 14, leading screw 15, mounting base plate 16, crawling moving mechanism 17 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com