Robot avoidance method, device, background server and storage medium
A background service and robot technology, applied in the field of robots, can solve unreasonable problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
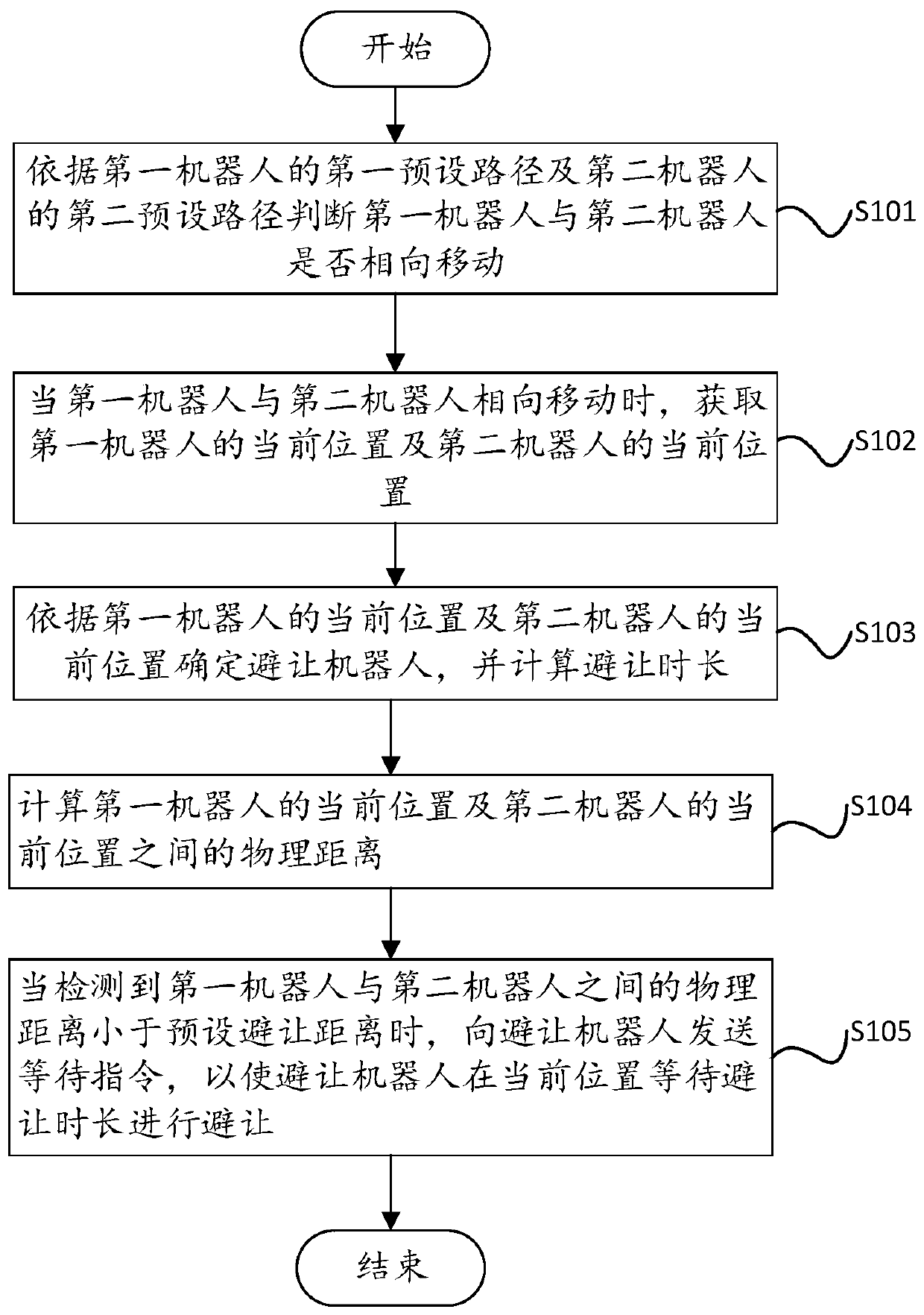
[0033] Please refer to image 3 , image 3 A flow chart of a robot avoidance method provided by an embodiment of the present invention is shown. The processing method includes the following steps:
[0034] Step S101 , judging whether the first robot and the second robot are moving toward each other according to the first preset path of the first robot and the second preset path of the second robot.
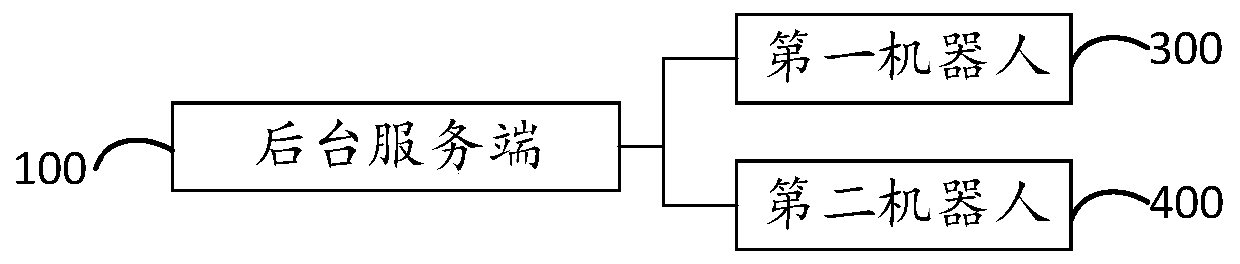
[0035] In the embodiment of the present invention, the first preset path is the movement path planned by the background server 100 for the first robot 300 in advance, and the first preset path includes at least two first navigation points arranged in sequence, the first The robot 300 passes through each first navigation point sequentially according to the order of the first navigation points in the first preset path. The second preset path is the movement path planned by the background server 100 for the second robot 400 in advance. The second preset path includes at least two ...
Embodiment approach
[0072] As an implementation, the method for determining the avoidance robot according to the current position of the first robot 300, the first interference starting point, the current position of the second robot 400, and the second interference starting point may be:
[0073] First, calculate the first physical distance between the current position of the first robot and the first interference starting point;
[0074] Secondly, calculate the second physical distance between the current position of the second robot and the second interference starting point;
[0075] Third, when the first physical distance is less than or equal to the second physical distance, the second robot is determined as an avoidance robot;
[0076] Fourth, when the first physical distance is greater than the second physical distance, the first robot is determined to be an avoidance robot.
[0077] In the embodiment of the present invention, the first navigation point and the second navigation point ar...
no. 2 example
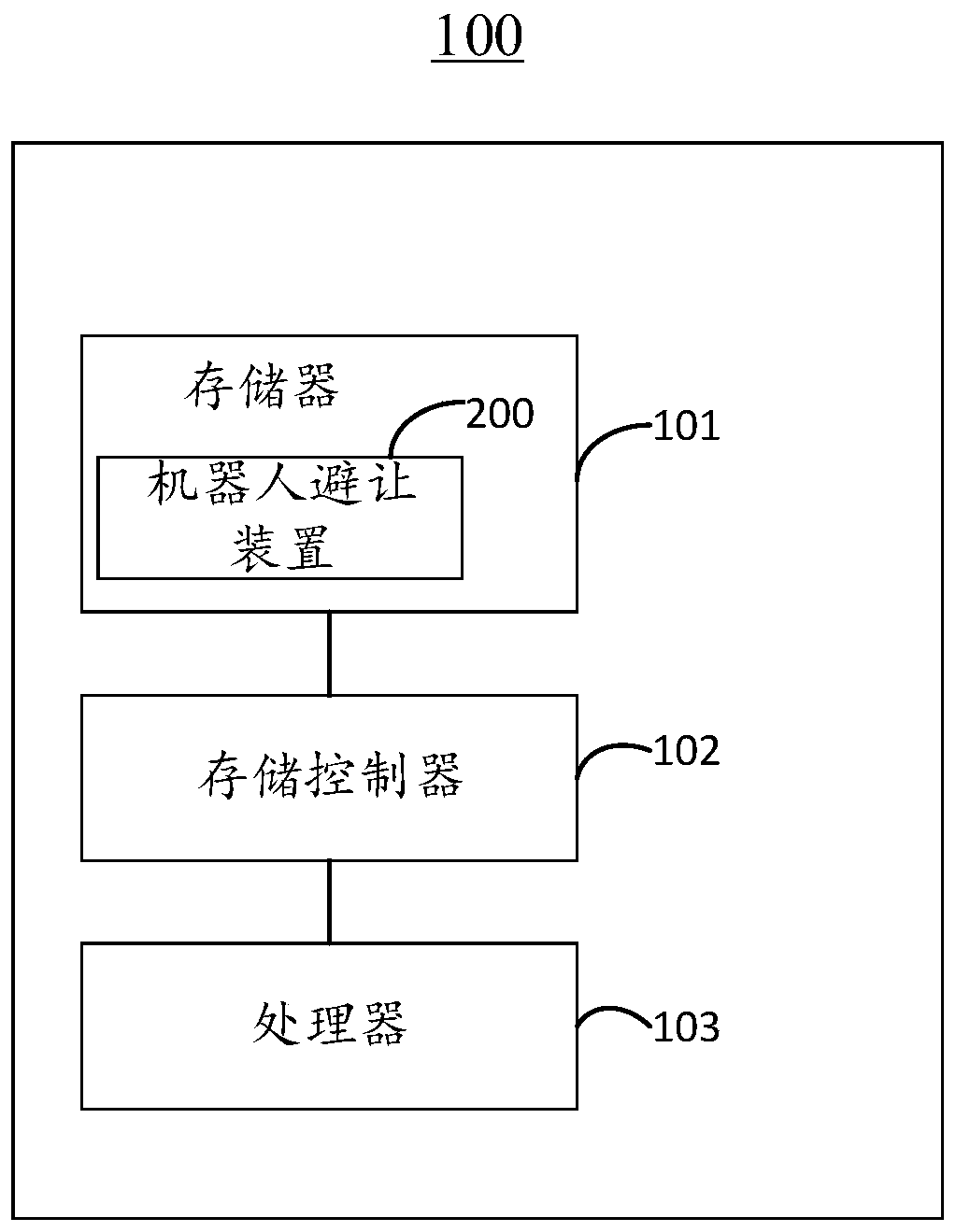
[0093] Please refer to Figure 11 , Figure 11 A schematic block diagram of a robot avoidance device 200 provided by an embodiment of the present invention is shown. The robot avoidance device 200 is applied to the background server 100 and includes a judgment module 201 ; an acquisition module 202 ; a determination module 203 ; a calculation module 204 ; and an avoidance module 205 .
[0094] The judging module 201 is configured to judge whether the first robot and the second robot are moving toward each other according to the first preset path of the first robot and the second preset path of the second robot.
[0095] In the embodiment of the present invention, the judging module 201 is used to execute step S101 and its sub-steps S1011-S1012.
[0096] The acquiring module 202 is configured to acquire the current position of the first robot and the current position of the second robot when the first robot and the second robot move toward each other.
[0097] In the embodim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com