A hexapod walking robot
A walking robot and rack technology, applied in the field of robots, can solve the problems of difficult robot control, heavy body weight, restricting the application of hexapod walking robots, etc., and achieve the effect of reducing the number of drivers, simple control, and reducing the weight of the whole machine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0017] exist figure 1 In the schematic diagram of the hexapod walking robot shown, the first mechanical leg 3 is connected to the front part of the frame 1 through the rotating shaft, the second mechanical leg 3' is connected to the middle part of the frame through the rotating shaft, and the third mechanical leg 3" passes through the The rotating shaft is connected to the rear of the frame. The structures of the three sets of mechanical legs are exactly the same. The rotating shafts connected to the three sets of mechanical legs and the frame are arranged parallel to each other. The electrical unit 2 is fixedly connected to the frame to control each set of The expansion and contraction of the telescopic rod in the mechanical leg;
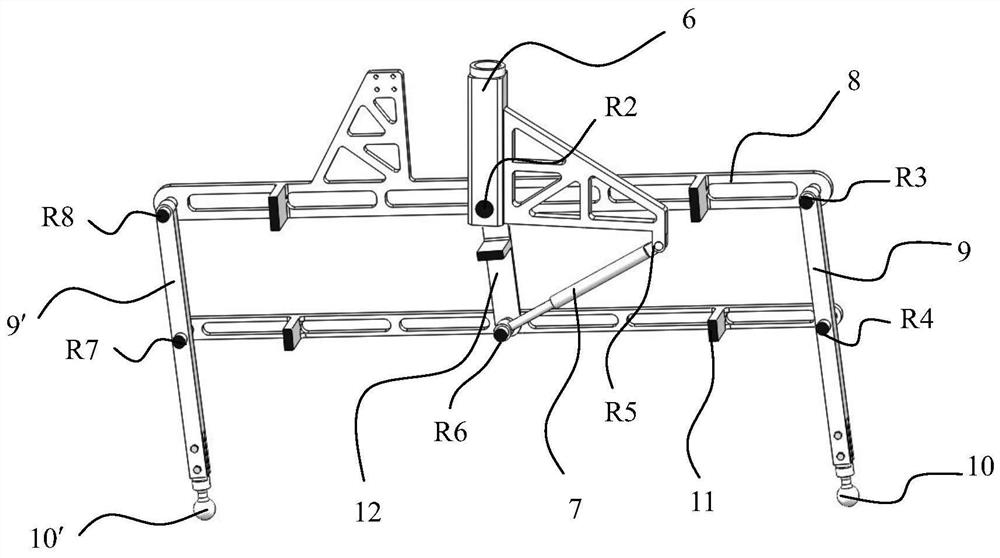
[0018] Such as figure 2 , image 3 and Figure 4 As shown, one side of the thigh support 6 in the mechanical leg is a column, and the other side is a tripod fixed to the column, and the upper end of the column is connected to the frame through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com