Unmanned vehicle emergency vehicle avoidance capacity test method and test field
An emergency vehicle and ability testing technology, which is applied in the direction of vehicle testing, machine/structural component testing, and measuring devices, can solve problems such as the inability to test close to unmanned vehicles, and achieve the goal of reducing the false recognition rate and increasing the success rate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0053] This embodiment provides a method for testing the avoidance ability of an emergency vehicle of an unmanned vehicle, including: performing scene layout on the test field and responding to the vehicle to be tested;
[0054] The scene layout is:
[0055] The test field includes a road, the vehicle to be tested 2 is placed on the road a, the reference vehicle 3 is controlled to drive in front or behind the same lane as the vehicle to be tested 2 or an adjacent lane, and the reference vehicle 3 and the vehicle to be tested 2. Keep the avoidable distance, and control the emergency vehicle 1 to approach the vehicle 2 under test from the rear of the same lane or the adjacent lane with the vehicle 2 under test;
[0056] The emergency vehicle in this embodiment is an ordinary vehicle controlled manually.
[0057] The response of the vehicle to be tested is:
[0058] When the emergency vehicle approaches the vehicle to be tested from the rear of the same lane or adjacent lanes of ...
Embodiment 2
[0096] On the basis of Embodiment 1, this embodiment provides a specific implementation of a method for testing the avoidance ability of an unmanned emergency vehicle.
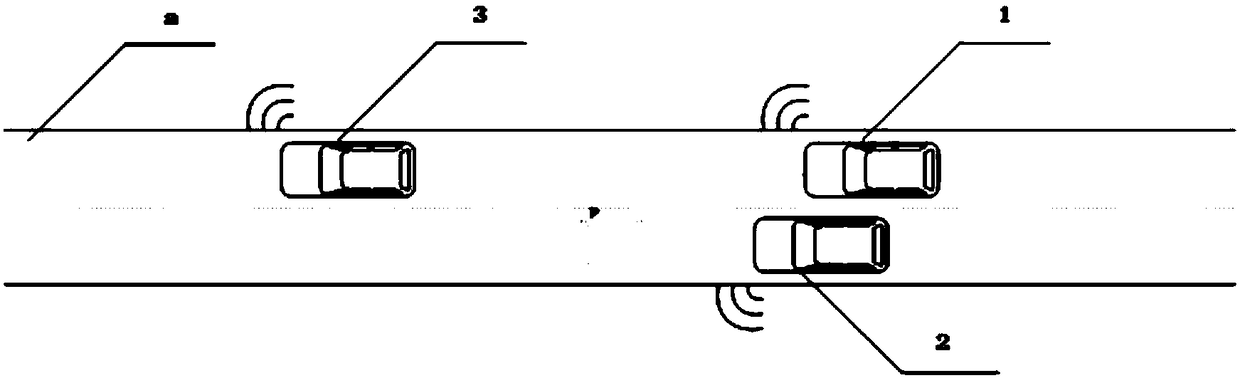
[0097] Such as figure 1 , the road a is one-way with two lanes, the emergency vehicle 1 is a human-driven vehicle, the test vehicle 2 and the reference vehicle 3 are unmanned vehicles. Place the emergency vehicle 1 and the reference vehicle 3 in the right lane, and the reference vehicle 3 is located 30m in front of the emergency vehicle 1; place the test vehicle 2 in the left lane, and the initial position is aligned with the emergency vehicle 1.
[0098] Simultaneously start the emergency vehicle 1, the vehicle to be tested 2 and the reference vehicle 3, and accelerate uniformly to 30km / h, 40km / h and 30km / h respectively. The emergency vehicle 1 is controlled to accelerate uniformly to 45km / h, and when approaching the vehicle under test 2 from the right rear, an early warning message is sent to the vehicle un...
Embodiment 3
[0100] On the basis of Embodiment 1, this embodiment provides a specific implementation of a method for testing the avoidance ability of an unmanned emergency vehicle.
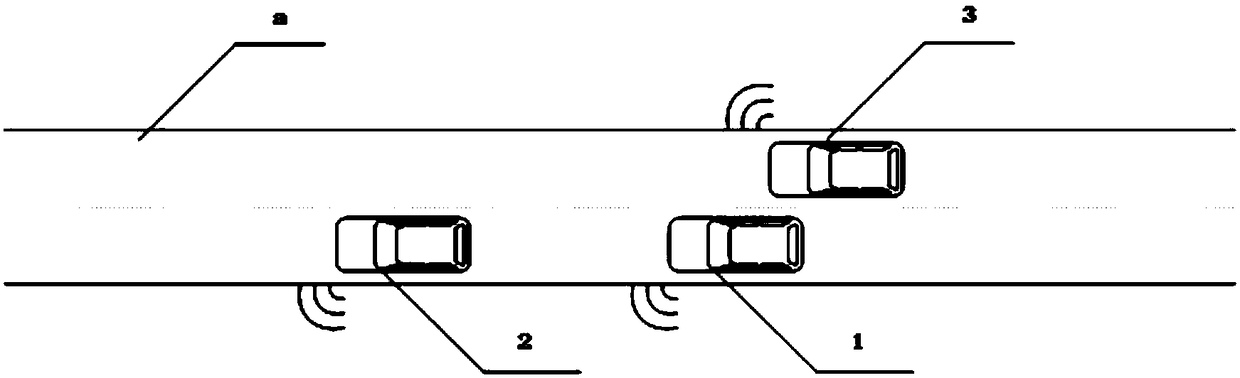
[0101] Such as figure 2 , the test field includes straight road a, emergency vehicle 1, vehicle to be tested 2 and reference vehicle 3. The straight road a is a one-way two-lane road, the emergency vehicle 1 is a human-driven vehicle, and the test vehicle 2 and the reference vehicle 3 are unmanned vehicles. Place the emergency vehicle 1 and the vehicle under test 2 on the left lane, and the vehicle under test 2 is located 30m in front of the emergency vehicle 1; place the reference vehicle 3 on the right lane, and the initial position is aligned with the emergency vehicle 1.
[0102] Simultaneously start the emergency vehicle 1, the vehicle to be tested 2 and the reference vehicle 3, and accelerate uniformly to 35km / h, 35km / h and 30km / h respectively. The emergency vehicle 1 is controlled to accelerate unifo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com