Spatial cell robot based on gear and gear rack transmission
A robot and cell technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of poor shear resistance, high energy consumption, difficult reconfiguration and movement, etc., to achieve small environmental impact, ensure reliability, and improve The effect of speed of movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
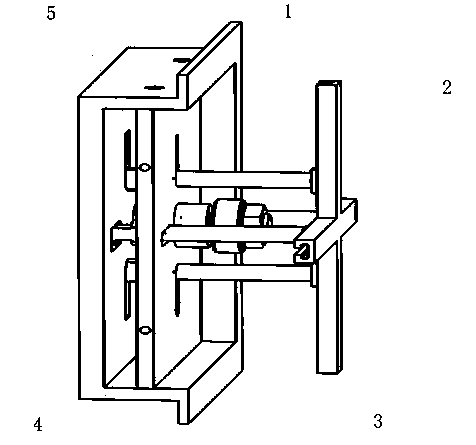
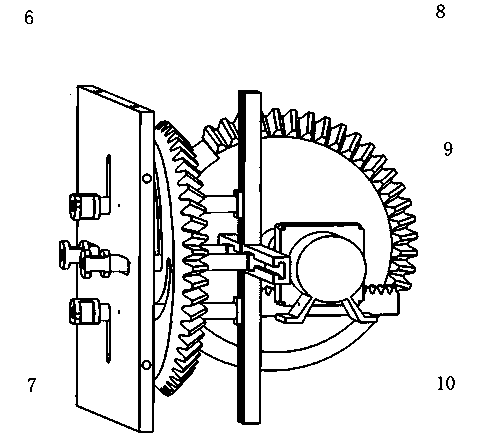
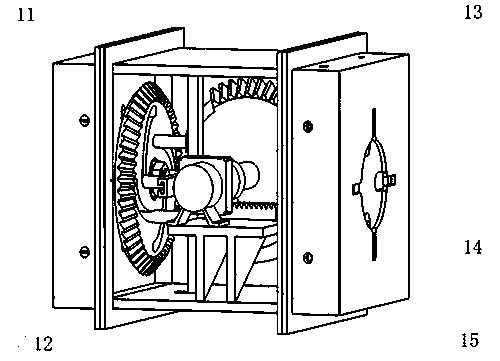
[0014] The specific structure and implementation mode of the present invention will be further described below in conjunction with the accompanying drawings.
[0015] The structural composition of the present invention is as figure 1 , figure 2 with image 3 shown. The space cell robot connection mechanism based on rack and pinion consists of a slider (1), a cross guide rail (2), a guide rail strut (3), a lock nut (4), a support plate (5), and a guide rail assembly (6), with Grooved bevel gear (7), incomplete bevel gear (8), servo motor (9), rack (10), housing end cover (11), screw (12), transmission shaft (13), incomplete Cylindrical gear (14), motor support plate (15) forms. The servo motor (9) is connected to the motor support plate as the source power device of the space cell robot, the transmission shaft (13) is connected to the servo motor (9), and the incomplete cylindrical gear (14) and the incomplete bevel gear (8) are coaxial Installation, by changing the energ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com