Infrared alignment signal data processing method applied to robot
A processing method and signal data technology, applied in the field of infrared alignment, can solve the problems of robot behavior deviation and low robustness, and achieve the effect of avoiding deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0020] Below by embodiment technical solution of the present invention is further described:
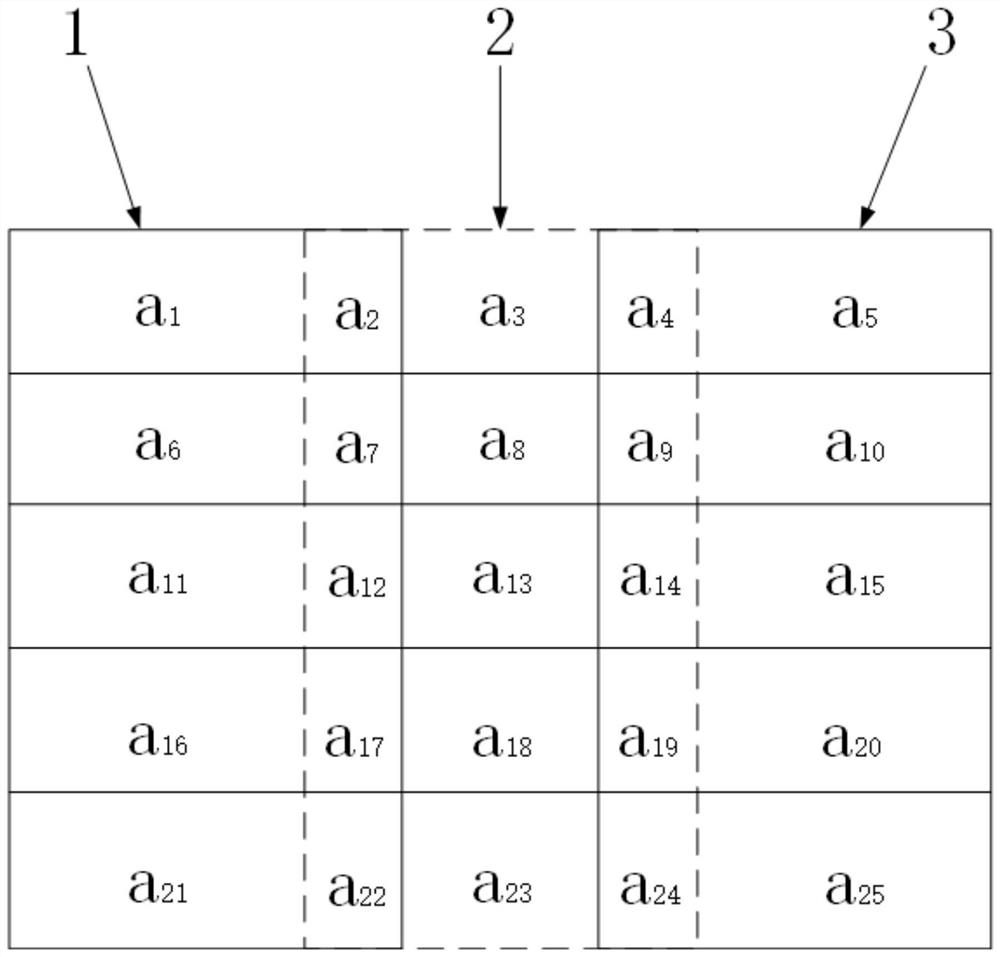
[0021] Such as figure 1 As shown, the present invention provides a method for processing infrared alignment signal data applied to a robot, the processing method comprising the following steps:
[0022] Step A. Divide the infrared signal field of the charging pile into N areas, and pre-set M kinds of deflection angles of the robot;
[0023] Step B, place the robot in the nth area, and adjust it to the mth kind of deflection angle;
[0024] Step C, recording the infrared signal information received by the robot;
[0025] Step D, adjusting the robot to the next deflection angle, m=m+1;
[0026] Step E, judging whether m is less than or equal to M, if so, then return to step B, if not, then proceed to step F;
[0027] Step F, placing the robot in the next area, n=n+1;
[0028] Step G, judging whether n is less than or equal to N, if so, then return to step B, if not, then proceed t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com