


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method and system for interacting with Internet of things equipment through AR camera of robot
A technology of IoT devices and interaction methods, applied in transmission systems, closed-circuit television systems, instruments, etc., can solve the problem of inability to achieve real-time interaction of robotic IoT devices, cumbersome operations, and inability to present basic information of IoT devices to monitoring personnel. Face and other problems, to achieve the effect of flexible real-time interaction process, reducing monitoring dead ends, and reducing equipment performance requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
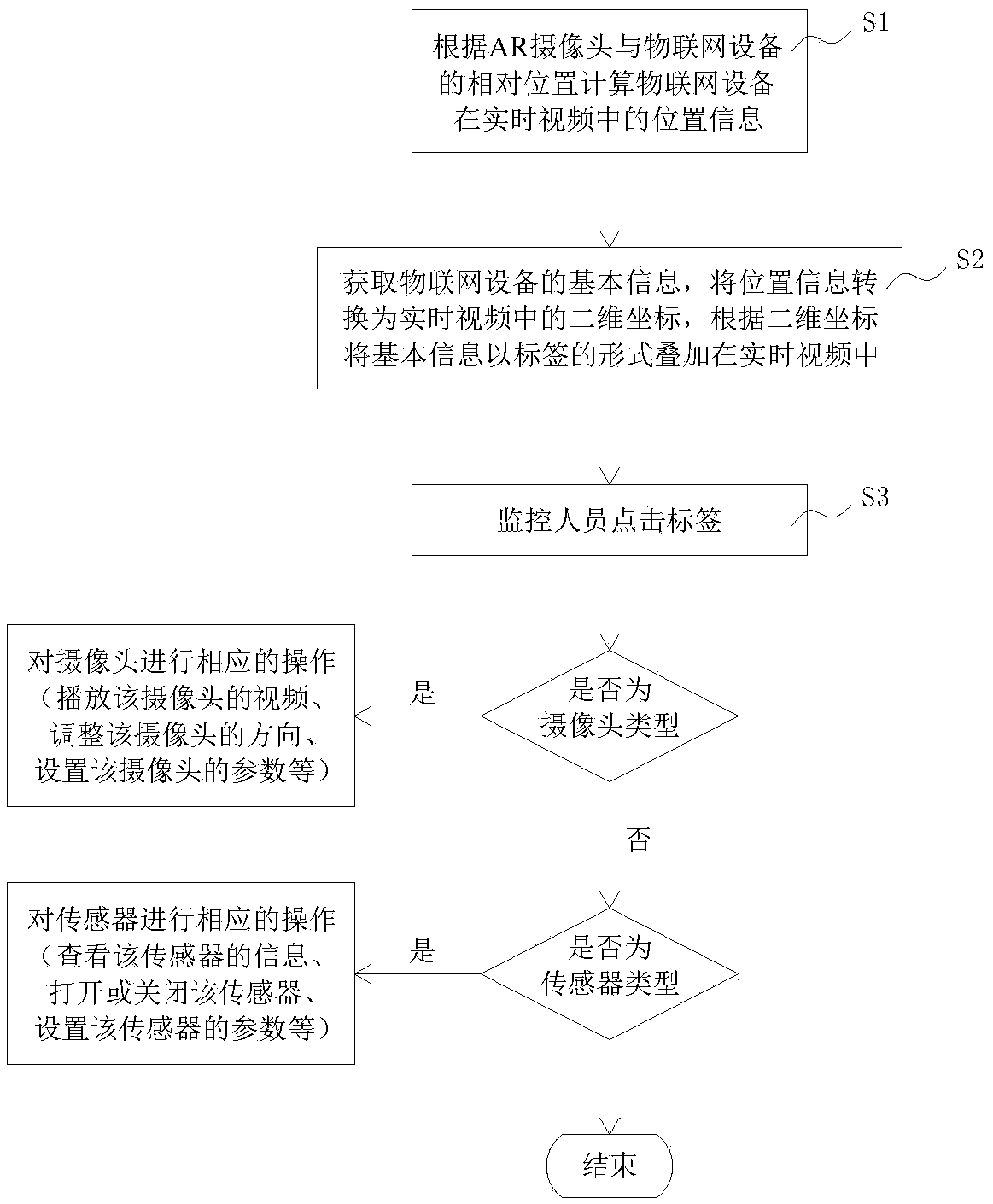
[0065] Such as figure 1 As shown, Embodiment 1 provides a method for interacting with an IoT device through a robot AR camera, including the following steps:
[0066] S1. The robot shoots real-time video through its AR camera, and obtains the relative position of the AR camera and the IoT device, calculates the position information of the IoT device in the real-time video according to the relative position of the AR camera and the IoT device, and combines the real-time video and The location information is sent to the monitoring terminal;
[0067] S2. The monitoring terminal acquires the basic information of the IoT device and superimposes the obtained basic information in the form of a label on the corresponding position of the IoT device in the real-time video according to the received location information;
[0068] S3. The monitoring personnel operate the IoT device by clicking on the label on the monitoring terminal.
[0069] In the specific implementation, the robot mov...
Embodiment 2
[0089] On the basis of Embodiment 1, the basic information of the IoT device includes not only global location information and altitude information, but also device management information. By knowing the device management information of the IoT devices, it is convenient for monitoring personnel to identify, manage and operate numerous IoT devices on site.
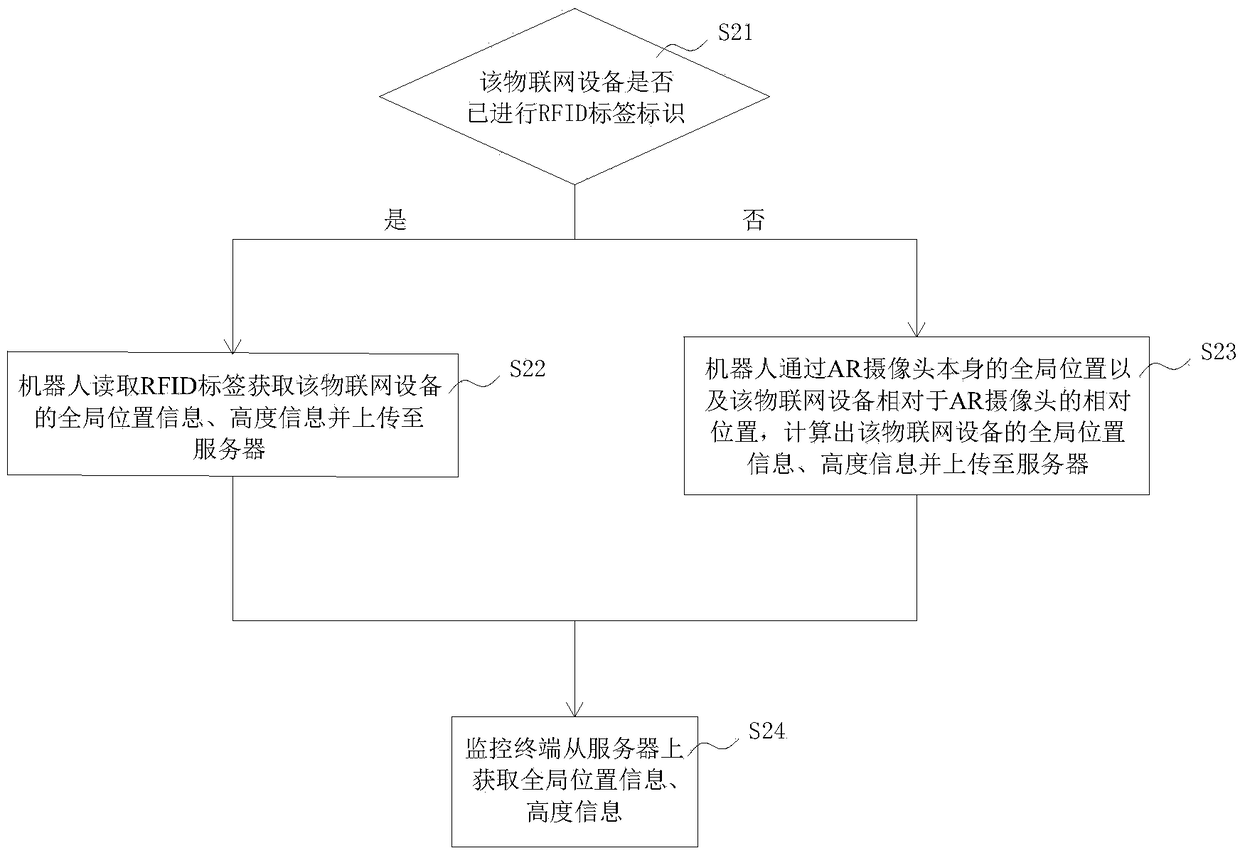
[0090] Such as image 3 As shown, in the specific implementation process of this embodiment 2, when the robot moves near a certain IoT device, it first judges whether a certain IoT device has been marked with an RFID tag, and the RFID tag has the unique global location information of the IoT device , height information, equipment management information.
[0091] If an RFID tag is set on an IoT device, read the RFID tag on the IoT device through the RFID reader installed on the robot to obtain the global location information, height information, and device management information of the IoT device. Then upload the informati...
Embodiment 3
[0101] Such as Figure 4 As shown, Embodiment 3 provides a system for interacting with IoT devices through a robot AR camera 11, including a robot 1, a monitoring terminal 2, and an IoT device 3. The robot 1 includes an AR camera 11 and a position calculation module 12. The monitoring terminal 2 includes a display 21, a controller 22, a playback processor 23, and an information acquisition module 24;
[0102] The AR camera 11 is used to shoot real-time video and send it to the playback processor 23. The AR camera 11 is also used to obtain the relative position of the IoT device 3 relative to the AR camera 11 and send it to the position calculation module 12;
[0103] The position calculation module 12 is used to calculate the position information of the IoT device 3 in the real-time video according to the received relative position, and send it to the playback processor 23;
[0104] The information acquisition module 24 is used to acquire the basic information of the IoT devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com