Scattered workpiece recognition and positioning method based on point cloud processing
A positioning method and point cloud technology, applied in the field of target recognition and positioning in the field of machine vision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to illustrate the technical solutions and advantages of the present invention more clearly, the specific implementation manners of the present invention will be described below in conjunction with specific examples and with reference to the accompanying drawings.
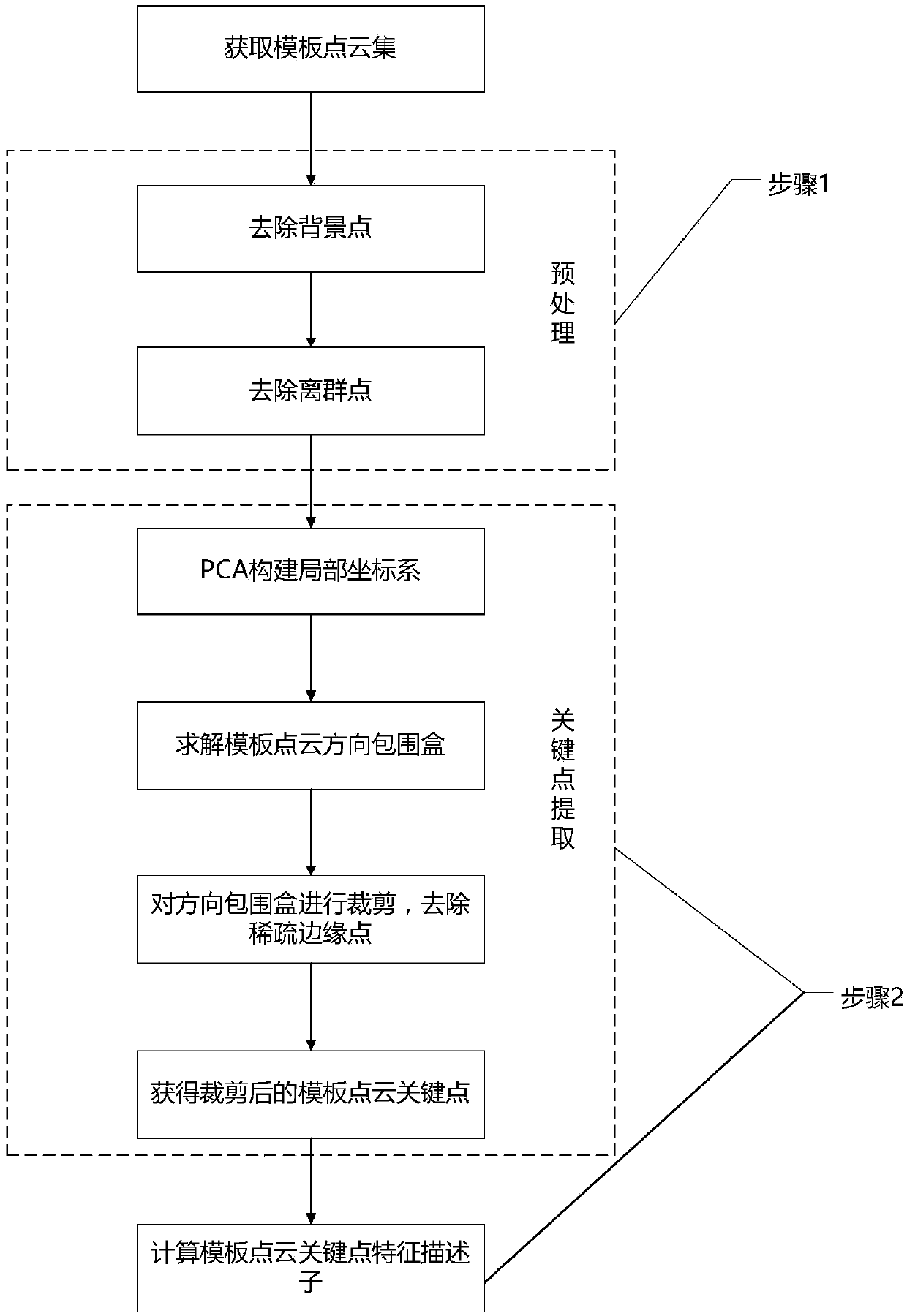
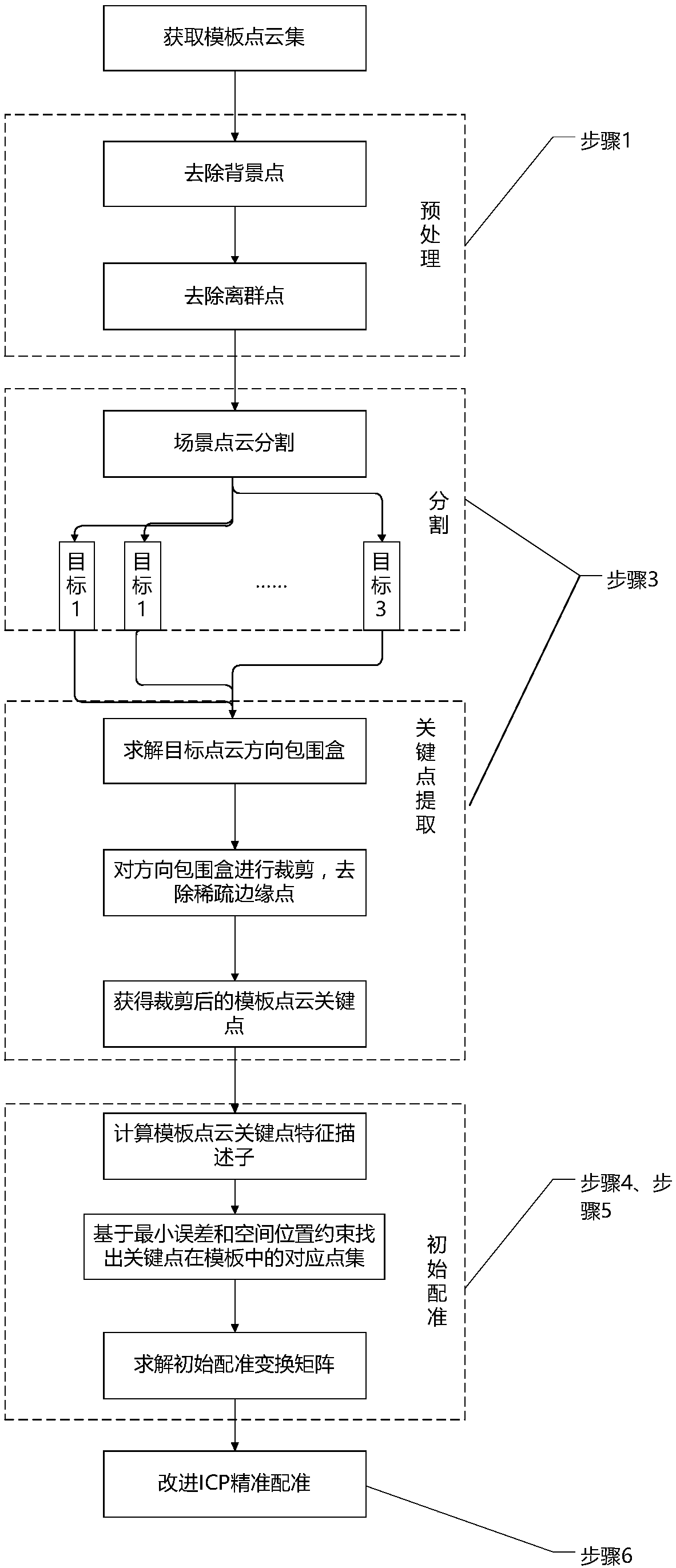
[0056] The invention discloses a method for identifying and locating scattered workpieces based on point cloud processing. The goal is to guide the robot to locate and grasp workpieces in the correct orientation from randomly placed and unsorted bins. The overall steps of the present invention include a process for processing in an offline state and a process for processing in an online state. to combine figure 1 , figure 2 , the overall steps of the present invention include:
[0057] Step 1. Preprocess the template point cloud and scene point cloud to obtain the template point cloud and scene point cloud after removing background points and outliers. The scene point cloud refers to the surface...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com