Control method of medical intelligent pushcart based on distributed sensor
A technology of distributed sensors and control methods, which is applied in the direction of trolleys, trolley accessories, and vehicle rescue, which can solve problems such as individual control, time wasting, inability to turn and rotate speed, etc., to avoid misoperation, facilitate force, and reduce vibration effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] The present invention will be further described in detail below in conjunction with the drawings and embodiments:
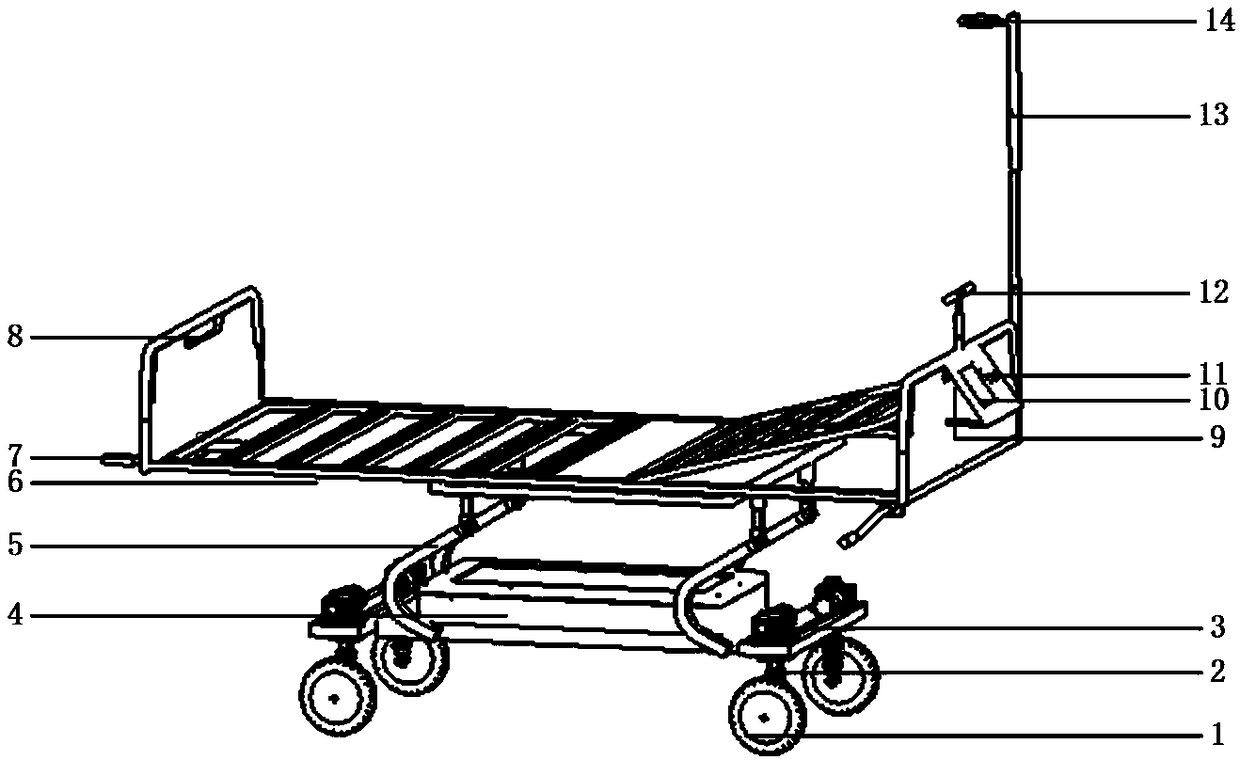
[0051] The present invention is a medical intelligent cart structure (as attached figure 1 (Shown) includes: 1. Hub motor; 2. Shock absorber; 3. Stepper motor and potentiometer; 4. Electric box. IMU inertial measurement module is placed on the electric box. There are 4 wheel hub motor drivers and 4 stepper motor drivers and embedded controller 1; 5. connecting rod; 6. cart body and cushion; 7, push rod; 8. guardrail frame; 9. pressure signal acquisition circuit board and embedded controller 2 ; 10. Industrial touch screen tablet computer; 11. Start switch and emergency stop switch; 12. Distributed flexible film pressure sensor and pusher; 13. Upper bracket; 14. Hanging bottle bracket.
[0052] Among them, there are 4 stepper motors and 4 hub motors.
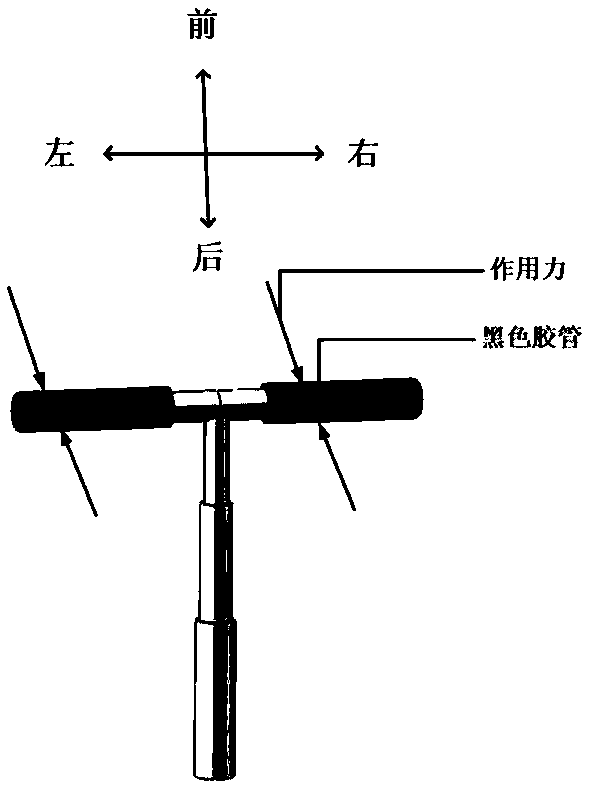
[0053] A distributed flexible film pressure sensor is installed on the pusher of the medical smart cart. The di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com