Indoor intelligent mobile robot and control method
A mobile robot and control method technology, applied in the field of robotics, can solve the problems of reducing the stability and reliability of target recognition, use site restrictions, and low flexibility, reducing matching and dynamic feature interference, ensuring real-time performance, and enhancing robustness. awesome effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] It is easy to understand that, according to the technical solution of the present invention, those skilled in the art can imagine various implementations of the indoor intelligent mobile robot and the control method of the present invention without changing the essence of the present invention. Therefore, the following specific embodiments and drawings are only exemplary descriptions of the technical solution of the present invention, and should not be regarded as the entirety of the present invention or as a limitation or limitation on the technical solution of the present invention.
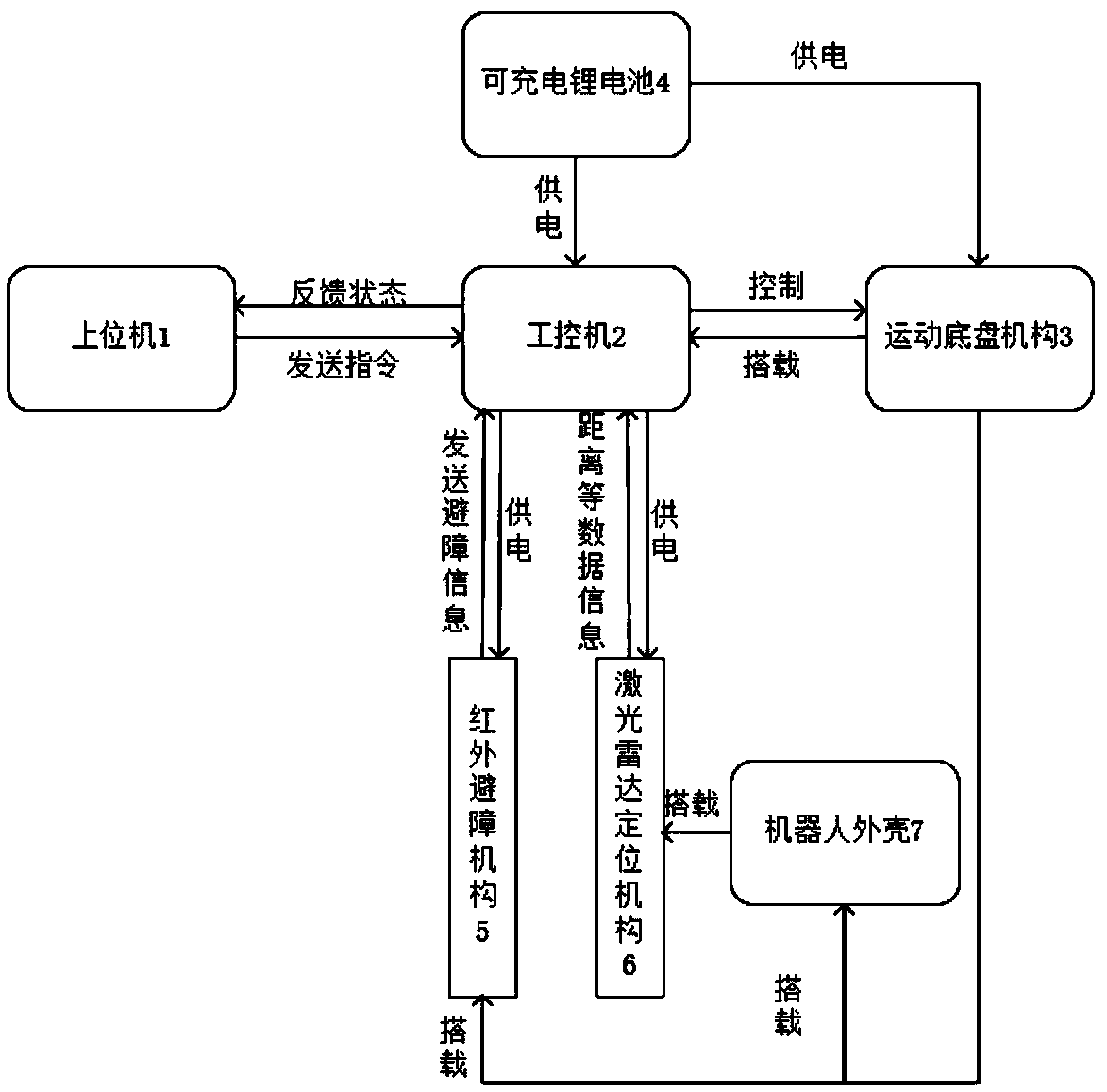
[0034] Such as figure 1 As shown, as an embodiment, the indoor intelligent mobile robot includes a host computer 1, an industrial computer 2, a motion chassis 3, an infrared obstacle avoidance mechanism 5 and a three-dimensional laser radar 6 (ie figure 1 LiDAR positioning mechanism in ). The upper computer 1 and the industrial computer 2 are connected through a data network, and the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com