Central pattern generator of key parameter decoupling oscillator
A mode generator and key parameter technology, applied in the field of bionic robots, can solve the problems of complex parameter setting and dynamic analysis, and the inability to control the trajectory of the robot's foot well, so as to achieve the effect of reducing complexity and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
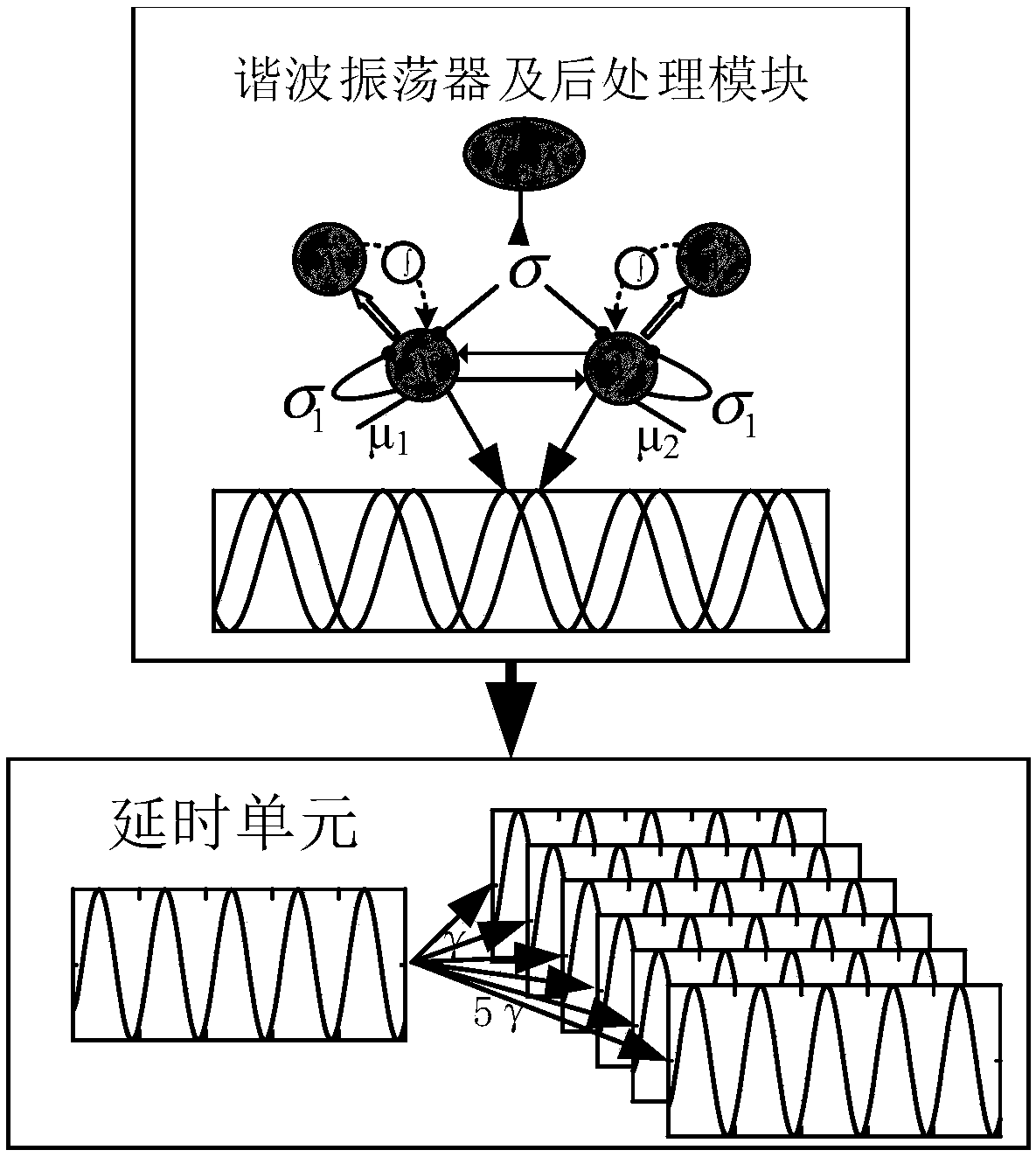
[0031] Such as figure 1 As shown, the present embodiment provides a central mode generator of a key parameter decoupling oscillator, and the mathematical model of the central mode generator is established by formula (1):
[0032]
[0033] In formula (1), x, y are the output signals of the central mode generator; are the differentials of x and y respectively; μ 1 , μ 2 is the external feedback item; T is the oscillation period of the oscillator; κ is the lifting ratio, 01 and σ are intermediate parameters.
[0034] In this embodiment, both x and y are the output signals of the central generator, and there is a fixed phase difference between x and y, such as figure 1 As shown, both x and y are sine or cosine signals, and the phase difference between x and y is cycle.
[0035] In this embodiment, the two gaits of the robot are the suspended state and the grounded state, and the output signal x is switched between the rising state and the falling state. When the output s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com