Visual SLAM-based cognitive point cloud map creation system
A map creation and map technology, applied in the field of cognitive point cloud map creation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
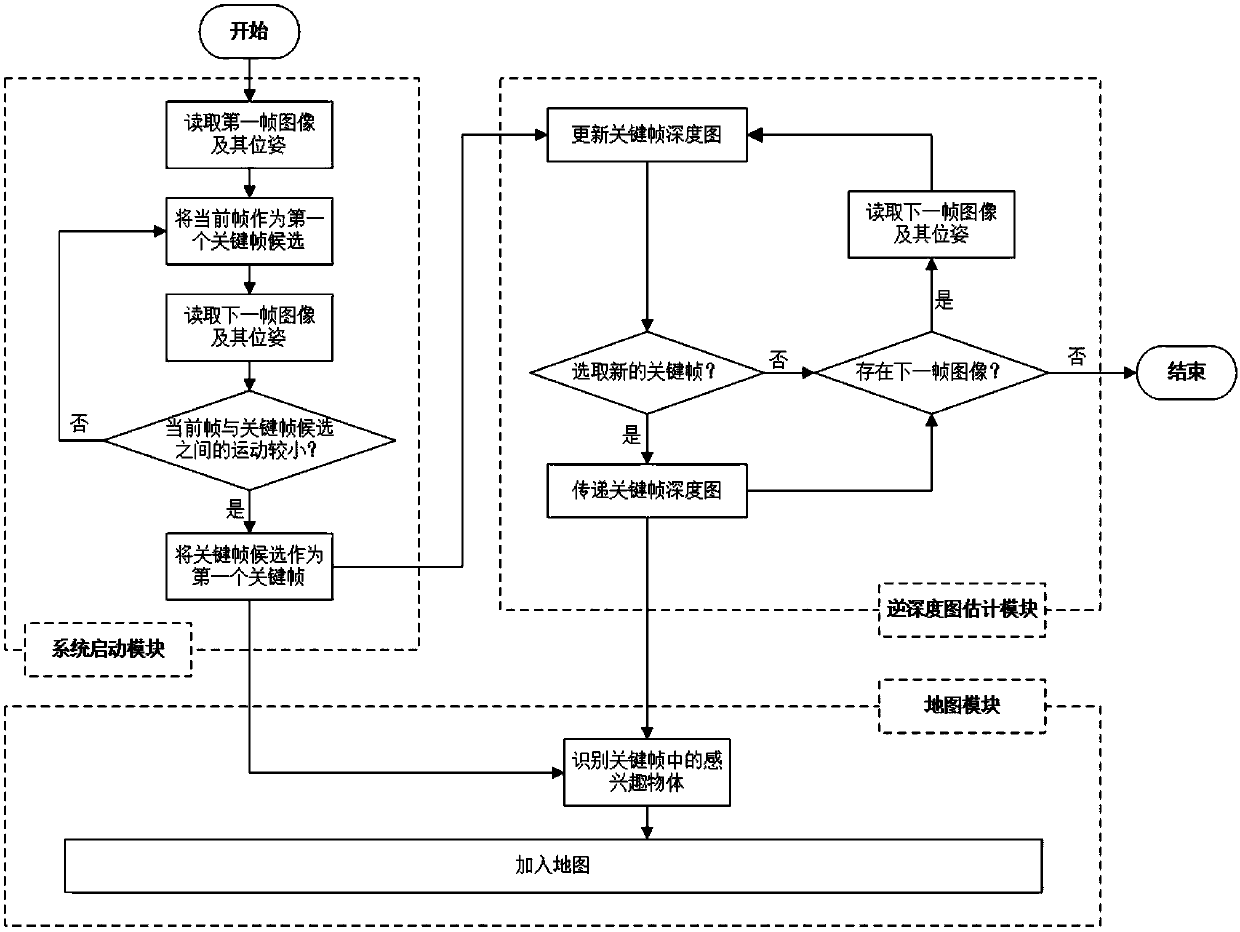
[0092] see figure 1 As shown, the cognitive point cloud map creation system of visual SLAM provided by this embodiment includes modules:
[0093] The system startup module selects the first key frame according to the range of motion of the camera, and the range of motion of the camera is described by the pose transformation between two frames of images represented by the Lie algebra se(3), including the following steps:
[0094] 1.1) Read the first frame image and use it as the first key frame candidate, only when it meets certain conditions can it really become the first key frame;
[0095] 1.2) Read the next frame image, and judge whether the motion range between it and the key frame candidate is small, the specific operation is as follows:
[0096] Let ξ∈se(3) repre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com