Method for replacing drop-out fuse of charged working robot based on force feedback master-slave control
A drop-type fuse, live operation technology, applied in the field of electric power, can solve the problem of difficult to judge whether the operation accuracy meets the operation requirements, etc., and achieve the effect of reducing the possibility of accidents, improving convenience and accuracy, and reducing danger.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] It is easy to understand that, according to the technical solution of the present invention, without changing the essence of the present invention, those skilled in the art can imagine various implementations of the method for replacing a drop-type fuse of the live working robot of the present invention. Therefore, the following specific embodiments and drawings are only exemplary descriptions of the technical solution of the present invention, and should not be regarded as the entirety of the present invention or as a limitation or limitation on the technical solution of the present invention.
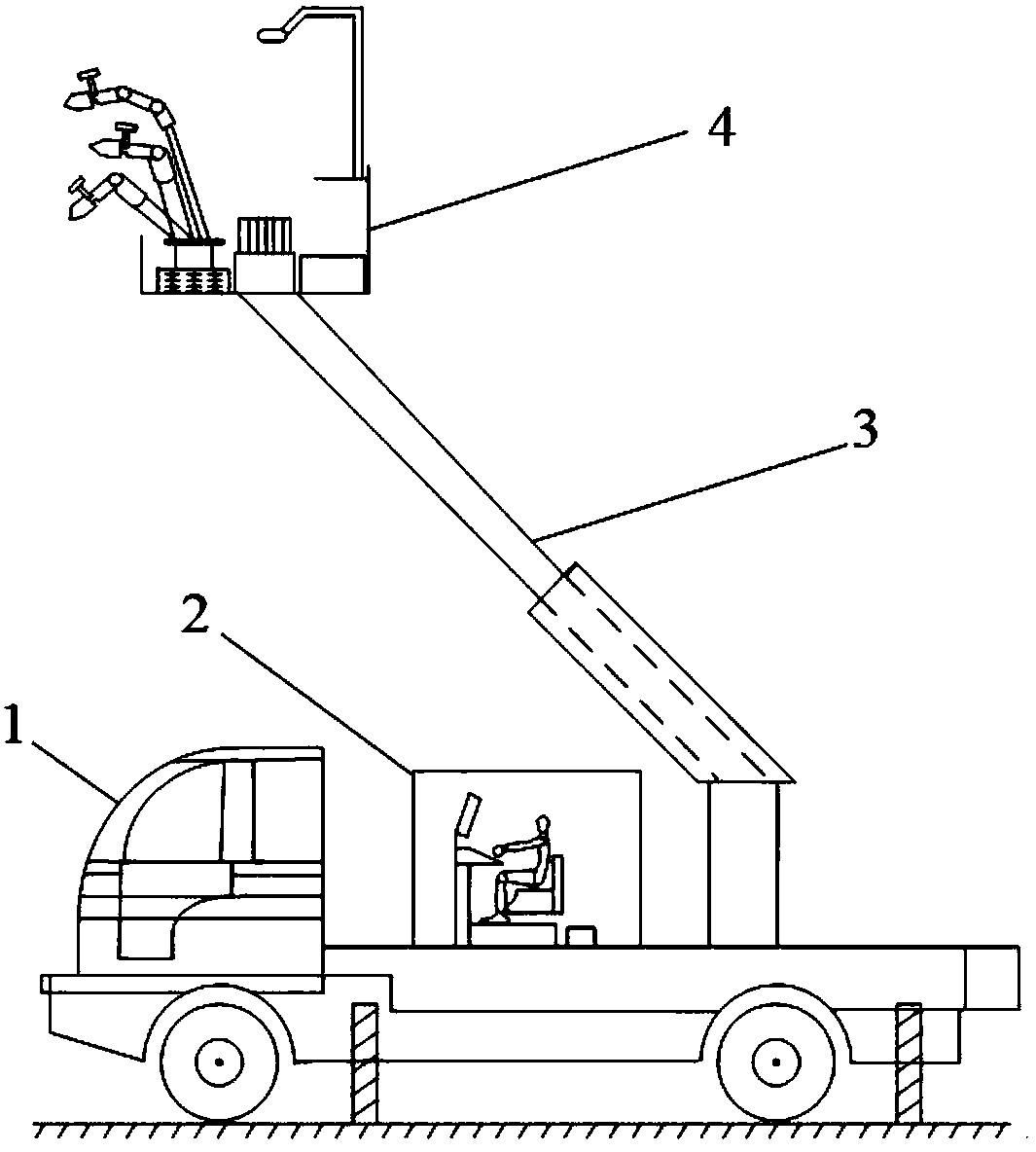
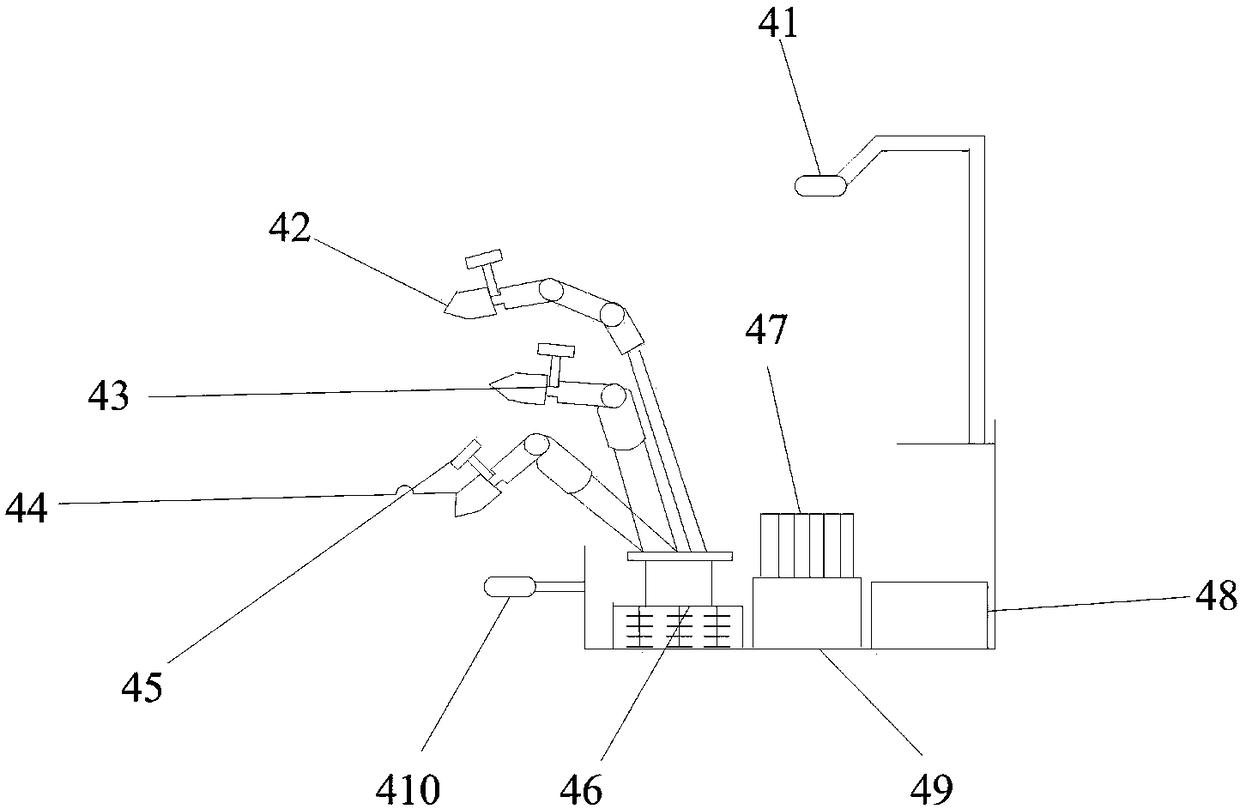
[0050] With reference to the accompanying drawings, the live working robot includes an insulated arm truck 1 , a control room 2 , a telescopic arm 3 , and a robot platform 4 . Among them, the control room 2 and the telescopic arm 3 are erected on the insulated bucket truck 1, and the end of the telescopic arm 3 is connected to the robot platform 4, and the fiber optic Ethernet c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com