A Method of Attitude Positioning Error Correction Based on Mems Inertial Measurement Unit
An inertial measurement unit and positioning error technology, applied in the field of inertial navigation, can solve problems such as the inability to use external information sources, achieve the effect of improving attitude positioning accuracy and reducing movement attitude positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be described in more detail below in conjunction with the accompanying drawings and embodiments.
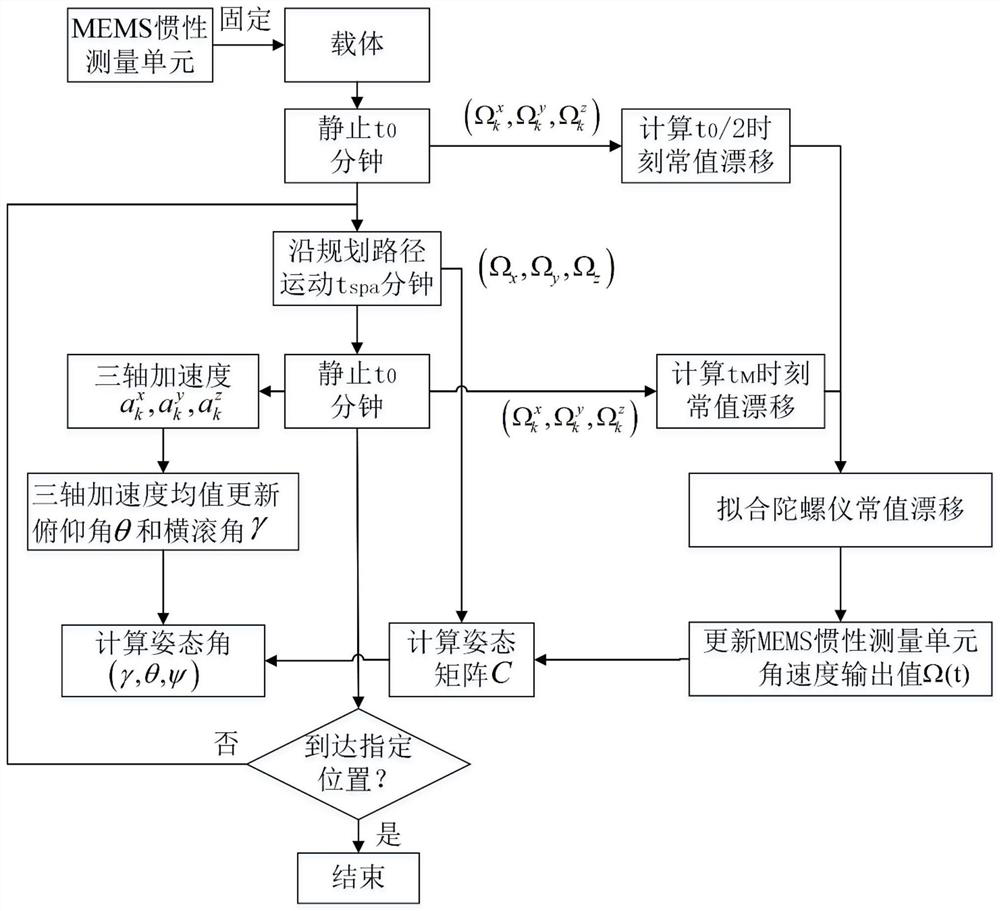
[0044] figure 1 A flow chart of a MEMS inertial measurement unit-based attitude positioning error correction method provided by the present invention is illustrated. The method includes the following steps:
[0045] 1) Define γ as the roll angle, θ as the pitch angle, and ψ as the heading angle, and establish a navigation coordinate system fixed on the ground at the initial position of the carrier motion o n -x n the y n z n ;Establish the IMU coordinate system o on the MEMS IMU b -x b the y b z b ; Set the navigation coordinate system o n -x n the y n z n z around itself n Rotate the axis by -ψ angle to get the coordinate system o-x 3 the y 3 z 3 , set the coordinate system o-x 3 the y 3 z 3 around itself x 3 Rotate the axis by θ angle to get the coordinate system o-x 2 the y 2 z 2 , set the coordinate system o-x 2 the y ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com