


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Intention-based computer depth learning automatic navigation and driving system and method thereof
A deep learning and automatic navigation technology, applied in the direction of motor vehicles, navigation computing tools, control/regulation systems, etc., can solve problems such as indistinguishable decision-making, and achieve low-cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
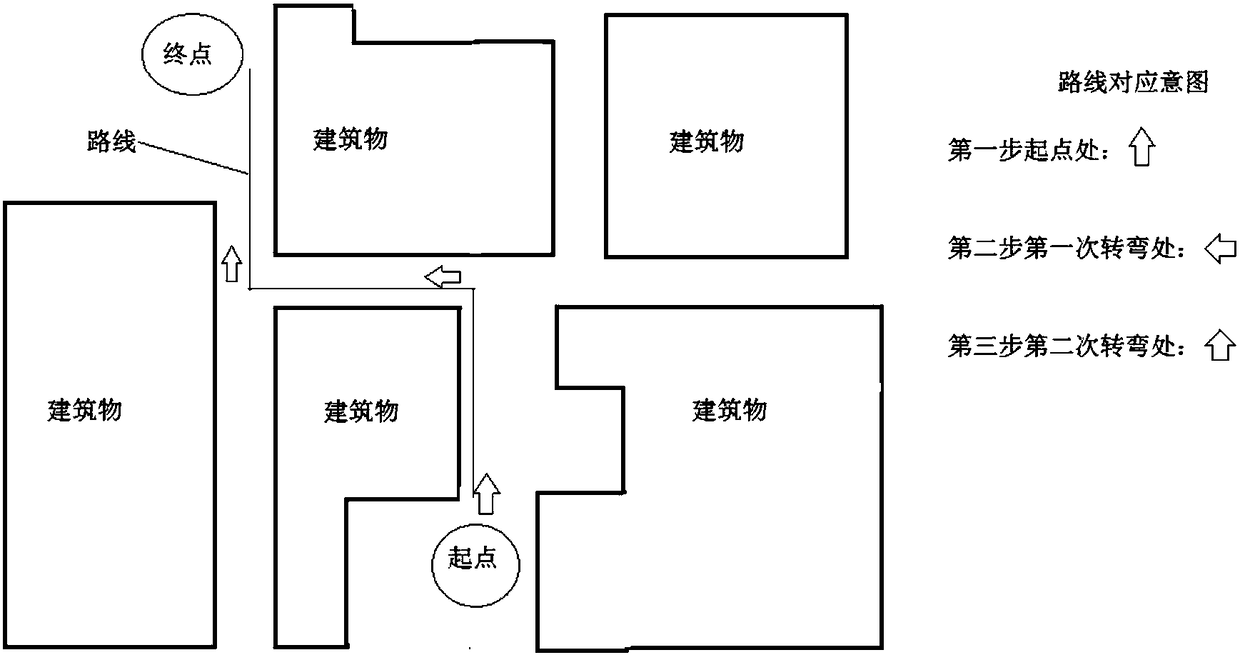
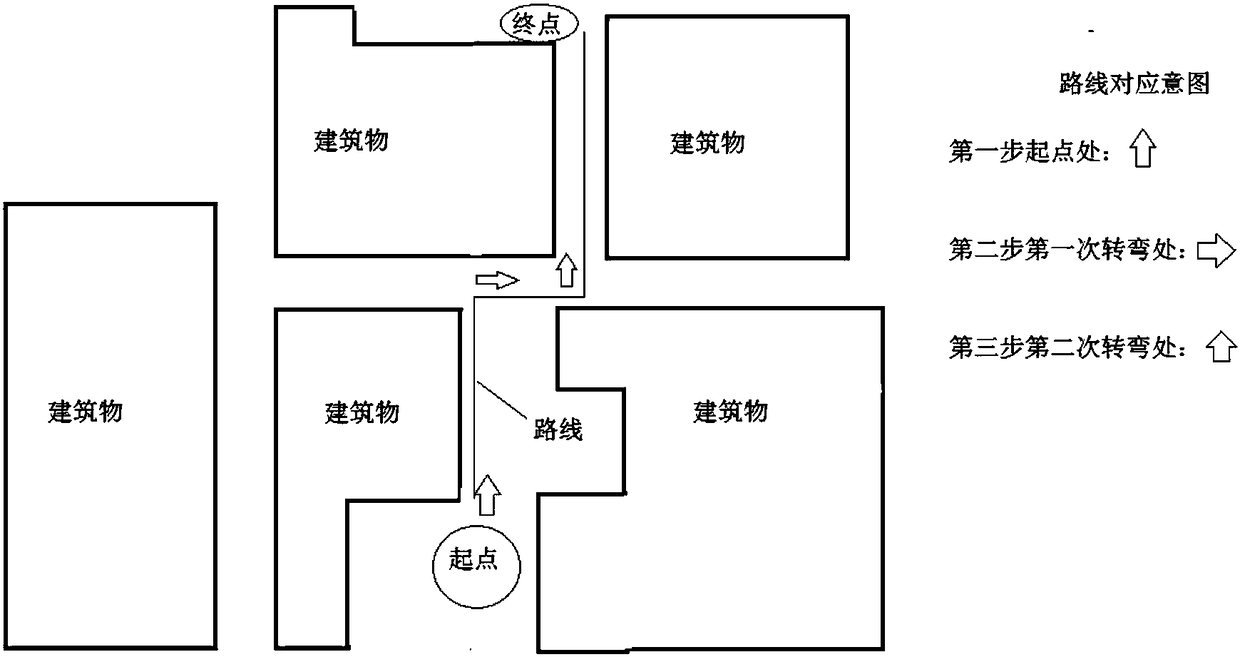
[0061] The top layer of the system plans the path from the start point to the end point (such as figure 1 , figure 2 ). The core innovation of this part is that the path planning of our system does not require a high-precision map, or even an incomplete map. For example, store floor plans, Google Maps, etc. Dynamic obstacles can be missing on the map, such as pedestrians and moving vehicles; static obstacles can be missing, such as shopping mall renovations, road maintenance and other situations where the map is not updated in time. The path planning of our system needs to ensure the most basic geometric structure, for example, where there are multiple intersections. Given such a map, we do the simplest path planning. For example, indoor robots: A star path planning, automatic driving, Google navigation. Since the top-level decision-making information of our system is very rough, we move the problem of maintaining the dynamic environment to the bottom-level decision-maki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com